MuJoCo
mujoco
机器人
4/5
💻 纯软件
已发布
项目简介
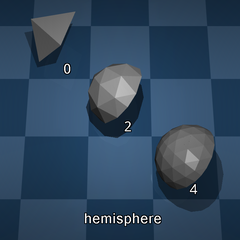
多关节动力学接触,通用物理模拟器。
MuJoCo,全称“Multi-Joint dynamics with Contact”,是由Google DeepMind维护的一款通用物理引擎,旨在为机器人学、生物力学、计算机图形与动画、机器学习等领域提供快速且精确的仿真能力。其核心功能是模拟多关节刚体系统与环境之间的接触与碰撞动力学,能够高效处理复杂的铰接结构运动。
标签
项目特点
**高性能物理模拟**:针对多关节动力学和接触进行优化,提供快速、准确的模拟。
**跨平台支持**:提供 Linux、Windows、macOS 的预编译二进制文件,并支持从源码构建。
**丰富的 API 和绑定**:提供 C API,以及 Python、JavaScript、C# 等语言的绑定,方便集成。
**原生交互式可视化**:内置基于 OpenGL 的 GUI,支持实时查看和交互。
**Python 生态集成**:提供 Python 绑定,并支持通过 Google Colab 在线体验教程。
**MJX (MuJoCo XLA)**:基于 JAX 的 MuJoCo 分支,支持可微分物理和加速计算。
**活跃的社区和维护**:由 Google DeepMind 维护,每月发布新版本,社区贡献活跃。
技术规格
| 编程语言 | C (核心), Python (绑定) |
|---|---|
| 支持平台 | Linux (x86-64, AArch64), Windows (x86-64), macOS (Universal) |
| Python 版本 | >= 3.10 |
| 许可证 | Apache 2.0 |
| 核心功能 | 多关节动力学、接触模拟、碰撞检测、可视化 |
| 扩展功能 | Python 绑定、Unity 插件、MJX (JAX 后端) |
| 文档 | [mujoco.readthedocs.io](https://mujoco.readthedocs.io) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 操作系统 | 1 | — | Linux, Windows, macOS |
| Python (>=3.10) | 1 | — | 使用 Python 绑定时必需 |
| 编译器 (如 GCC, Clang) | 1 | — | 从源码构建时必需 |
| CMake | 1 | — | 从源码构建时必需 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 1/5
🔵 创造与创新: 4/5
项目图库









所需技能
🔧 **动手能力**:能够配置开发环境,从源码编译(可选),并运行模拟器。
💻 **编程能力**:需要 C 或 Python 编程基础,理解物理模拟和机器人学概念。
⚡ **电子电路**:不涉及硬件,但理解机器人运动学和动力学有帮助。
适用场景
**机器人学**:用于机器人运动规划、控制算法开发和仿真测试。
**生物力学**:模拟人体或动物运动,研究步态、运动控制等。
**机器学习/强化学习**:作为环境模拟器,训练智能体在物理世界中学习。
**计算机图形学与动画**:生成物理上合理的角色动画和特效。
**教育与研究**:作为物理模拟的教学工具,或进行可微分物理、模型预测控制等前沿研究。