ArduPilot 自动驾驶仪
ardupilot
无人机
4/5
🧩 软硬件结合
已发布
项目简介
ArduPlane、ArduCopter、ArduRover、ArduSub源码。
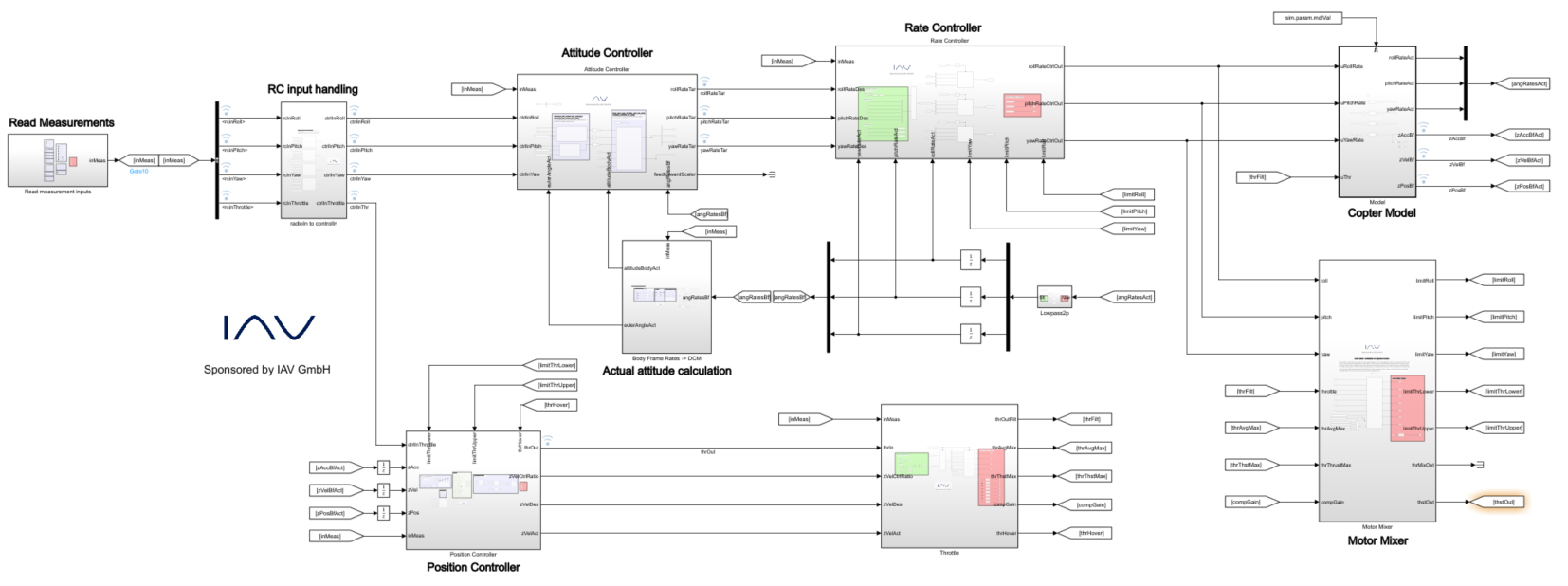
ArduPilot 是一款全球领先的开源自动驾驶仪软件,自2010年起由专业工程师、计算机科学家和社区贡献者共同开发,以其先进、全面和极高的可靠性著称。该项目旨在为几乎所有类型的无人驾驶车辆提供强大的自主控制能力,解决了从消费级无人机到工业级无人系统在飞行控制、导航和任务规划上的核心需求。其技术栈基于C++,运行在高效的实时操作系统(如ChibiOS)上,并支持多种硬件平台,包括Pixhawk系列飞控板以及Linux单板计算机。ArduPilot的核心功能覆盖了从传统固定翼飞机、多旋翼、直升机,到地面车辆(如汽车、平衡车)、船只甚至潜艇的完整控制。项目内部细分为多个子项目,包括专为多旋翼优化的ArduCopter、为固定翼设计的ArduPlane、为地面车辆打造的Rover、为水下机器人开发的ArduSub,以及用于自动跟踪天线的Antenna Tracker。这些模块共享一个强大的底层库,支持丰富的传感器融合、GPS导航、自主航线规划、避障以及复杂的任务逻辑。ArduPilot的适用场景极为广泛,从农业植保、物流配送、测绘巡检,到科研探索、搜救行动和影视航拍,都能提供稳定可靠的解决方案。凭借其活跃的社区论坛、详尽的维基文档和持续集成的自动化测试体系,ArduPilot不仅降低了无人机开发的门槛,也为专业开发者提供了高度可定制的平台,是推动无人系统技术普及和创新的重要力量。
标签
项目特点
**多平台支持**:支持 ArduCopter(多旋翼)、ArduPlane(固定翼)、Rover(无人车)、ArduSub(水下潜航器)和 Antenna Tracker(天线跟踪器)。
**高度可靠**:经过多年开发和广泛测试,拥有庞大的用户和开发者社区。
**功能全面**:具备自主导航、任务规划、航点跟踪、故障保护、数据记录等丰富功能。
**开源免费**:基于 GPLv3 许可证,代码完全开放,鼓励社区参与和贡献。
**活跃的社区**:拥有专业的支持论坛、开发者维基和实时聊天频道。
技术规格
| 支持车辆类型 | 多旋翼、固定翼、无人车、无人船、水下潜航器、天线跟踪器 |
|---|---|
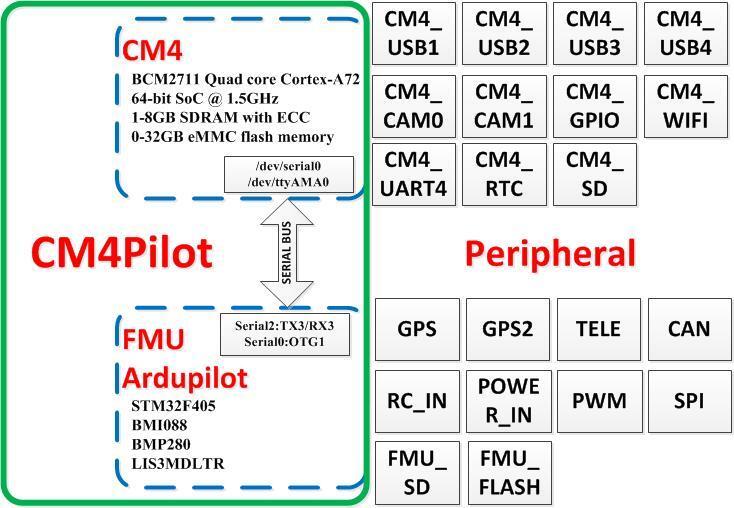
| 核心架构 | 基于实时操作系统 (ChibiOS/RT) 和 Linux |
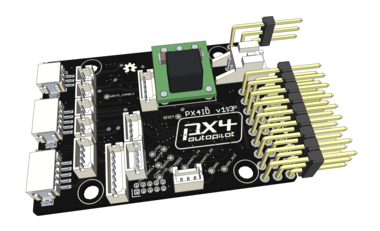
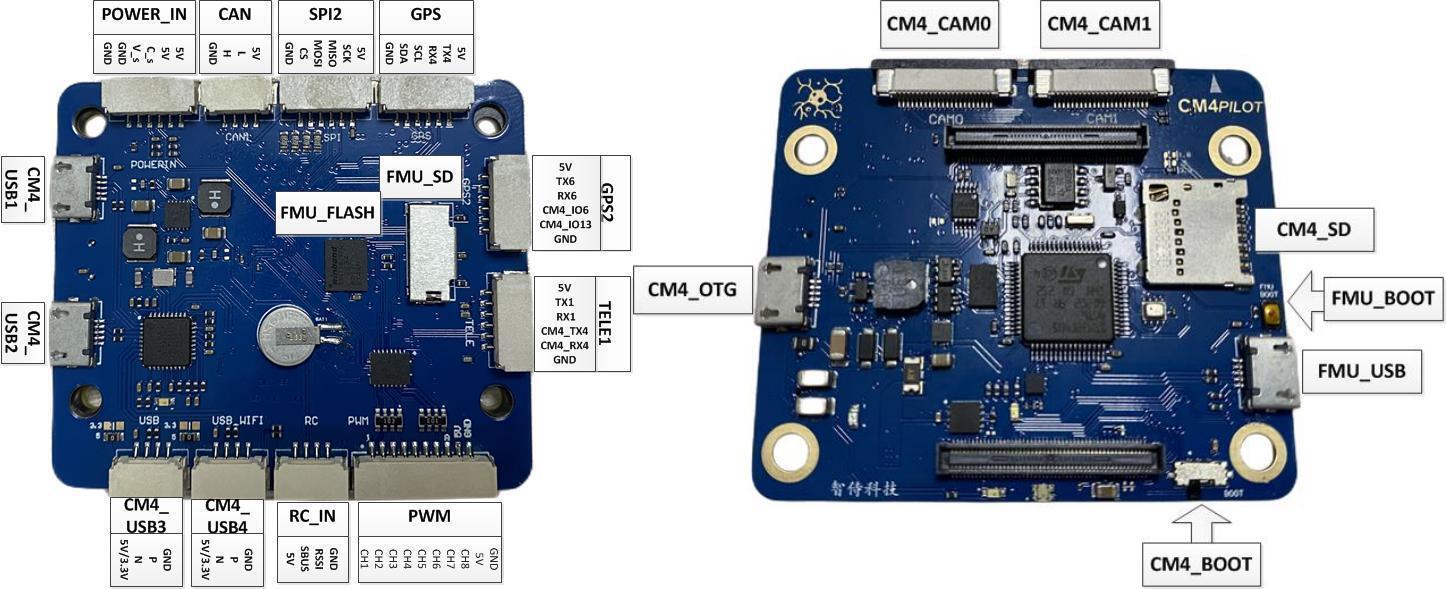
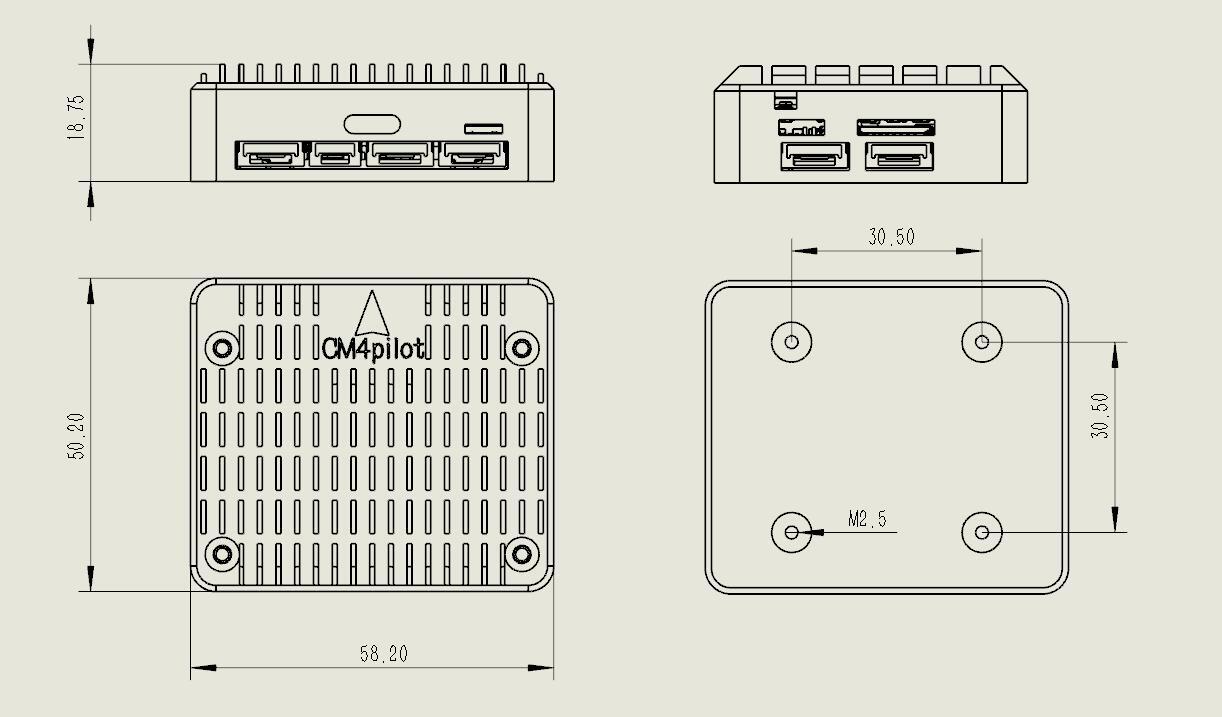
| 硬件平台 | Pixhawk, Pixhawk2, PixRacer, Cube*, NavIO, Bebop, BeagleBone Blue 等 |
| 编程语言 | C++ |
| 传感器支持 | GPS、IMU、气压计、磁力计、光流、激光雷达、声纳等 |
| 通信协议 | MAVLink |
| 许可证 | GNU General Public License v3.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Pixhawk 或兼容板 | 1 | — | 核心控制器 |
| GPS 模块 | 1 | — | 用于定位 |
| 空速计 | 1 | — | 用于固定翼 |
| 电流/电压传感器 | 1 | — | 电源管理 |
| 舵机/电调 | 若干 | — | 根据机型 |
| 数传模块 | 1 | — | 地面站通信 |
| 电源模块 | 1 | — | 为飞控供电 |
| 机架/机身 | 1 | — | 根据机型选择 |
3D 模型
能力画像
⚪ 记忆与知识检索: 3/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 5/5
⚪ 创造与创新: 4/5
项目图库







所需技能
🔧 **动手能力**:需要具备一定的硬件组装、焊接和调试能力,能够搭建和维修无人机或机器人平台。
💻 **编程能力**:需要掌握 C++ 编程,能够阅读和修改 ArduPilot 源代码,理解嵌入式系统开发。
⚡ **电子电路**:需要了解基本的电子电路知识,能够连接传感器、执行器和电源模块,并进行故障排查。
适用场景
**无人机研发**:用于开发和研究各种类型的无人机,如航拍、测绘、农业植保、物流配送等。
**机器人竞赛**:作为地面机器人或水下机器人的控制核心,参与各类机器人竞赛。
**学术研究**:用于无人机控制算法、路径规划、多机协同等领域的学术研究。
**工业应用**:用于工业巡检、环境监测、搜救等专业应用场景。
**个人爱好**:适合有经验的爱好者搭建和定制自己的无人系统。