Python机器人算法库
PythonRobotics
机器人
5/5
🧩 软硬件结合
已发布
项目简介
Python机器人算法示例代码与教材。
Python机器人学是由AtsushiSakai开发的开源项目,提供了丰富的Python代码示例和算法实现,用于机器人学中的路径规划、运动控制和传感器融合等任务。项目包含了从基础到高级的多种算法,如A*搜索、RRT、PID控制器和卡尔曼滤波。
标签
项目特点
代码简洁易读,专注于算法核心思想,适合教学和学习。
精选广泛使用的实用算法,覆盖机器人学主要子领域。
最小依赖,仅需 Python 及 NumPy、SciPy、Matplotlib 等常见科学计算库。
提供完整的在线文档(教科书),包含数学背景和更多示例。
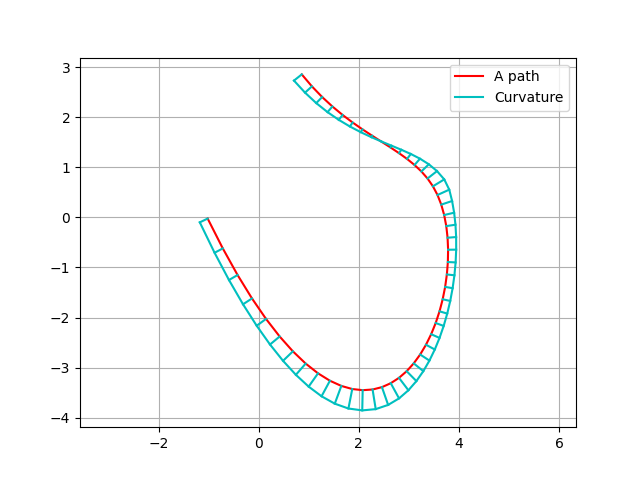
所有示例均配有动画 GIF,直观展示算法效果。
跨平台支持(Linux、macOS、Windows),持续集成测试保障代码质量。
技术规格
| 编程语言 | Python 3.13.x |
|---|---|
| 核心依赖 | NumPy, SciPy, Matplotlib, cvxpy |
| 开发依赖 | pytest, pytest-xdist, mypy, sphinx, pycodestyle |
| 支持平台 | Linux, macOS, Windows |
| 算法模块 | 定位、建图、SLAM、路径规划、路径跟踪、机械臂导航、空中导航、双足步行 |
| 文档形式 | 在线 HTML 教科书(Sphinx 生成) |
| 许可证 | MIT |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3.13.x | 1 | — | 运行环境 |
| NumPy | 1 | — | 数值计算 |
| SciPy | 1 | — | 科学计算 |
| Matplotlib | 1 | — | 可视化 |
| cvxpy | 1 | — | 凸优化(部分算法需要) |
| pytest (可选) | 1 | — | 单元测试 |
| mypy (可选) | 1 | — | 类型检查 |
| sphinx (可选) | 1 | — | 文档生成 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 1/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库








所需技能
🔧 **动手能力**:无需硬件动手能力,纯软件项目。
💻 **编程能力**:需要 Python 基础,理解面向对象编程和科学计算库(NumPy、Matplotlib)的使用。
⚡ **电子电路**:不需要。
适用场景
机器人学课程教学与自学,通过代码理解算法原理。
机器人算法研究与快速原型验证,测试不同算法在仿真环境中的表现。
作为机器人项目开发的参考代码库,快速集成标准算法模块。
学术论文的算法复现与对比基准。