定制角腿四足机器人
Custom-angular-leg-Quadruped-Robot
四足/人形机器人
3/5
🧩 软硬件结合
已发布

项目简介
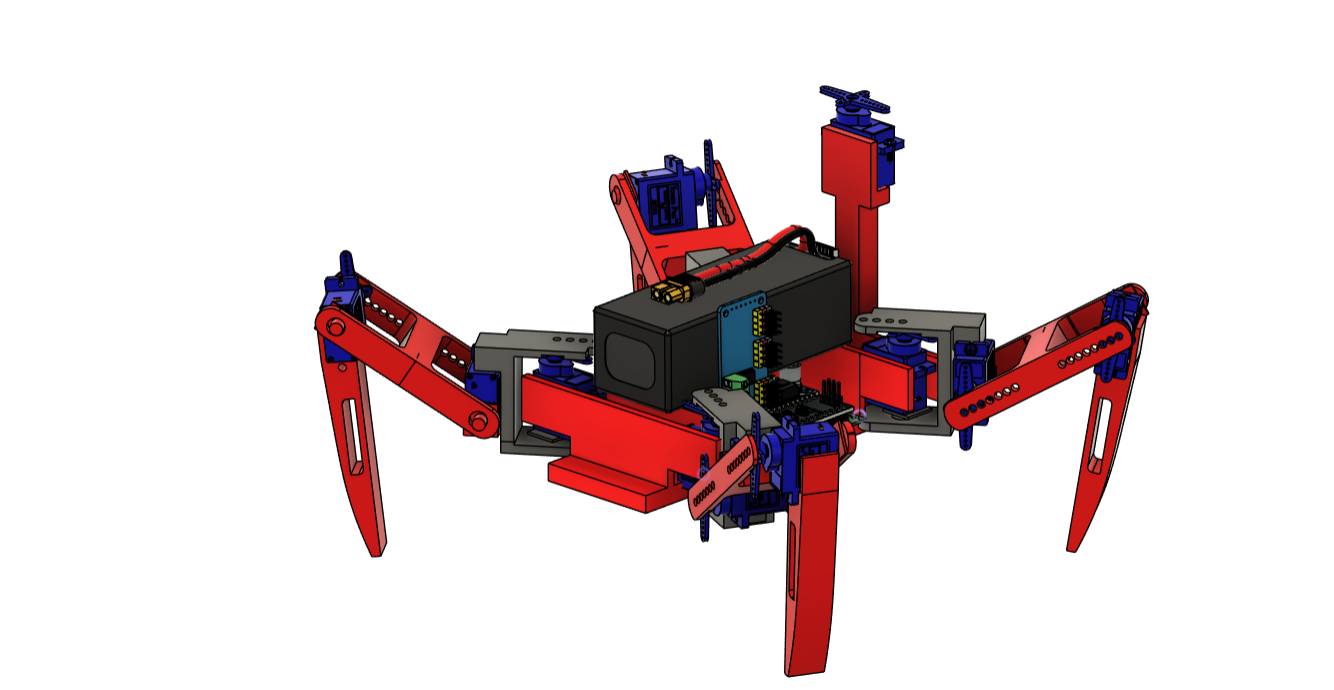
开源四足机器人,含定制CAD、PCB及Arduino行走固件。
一款完全开源的四足机器人,包含定制的CAD设计、PCB电路板以及基于Arduino的行走固件。
项目特点
**完全开源**:所有设计文件(CAD、PChttps://raw.githubusercontent.com/Prathviraj-mv/Custom-angular-leg-Quadruped-Rohttps://raw.githubusercontent.com/Prathviraj-mv/Custom-angular-leg-Quadruped-Robot/main/Images/)开,便于学习和修改
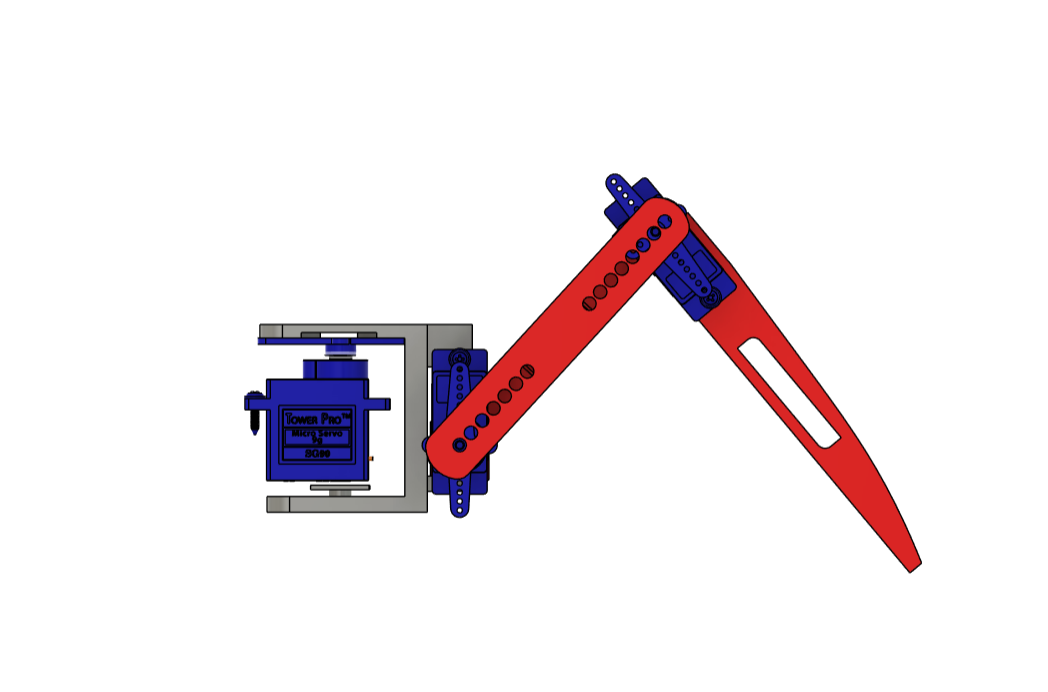
**独特角腿设计**:采用创新的角腿结构,优化了机器人的运动性能和稳定性
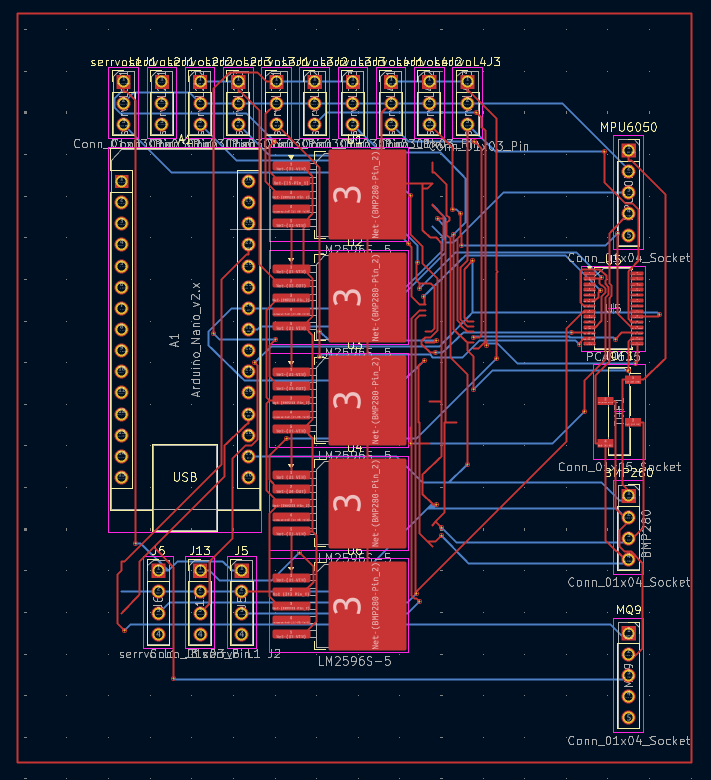
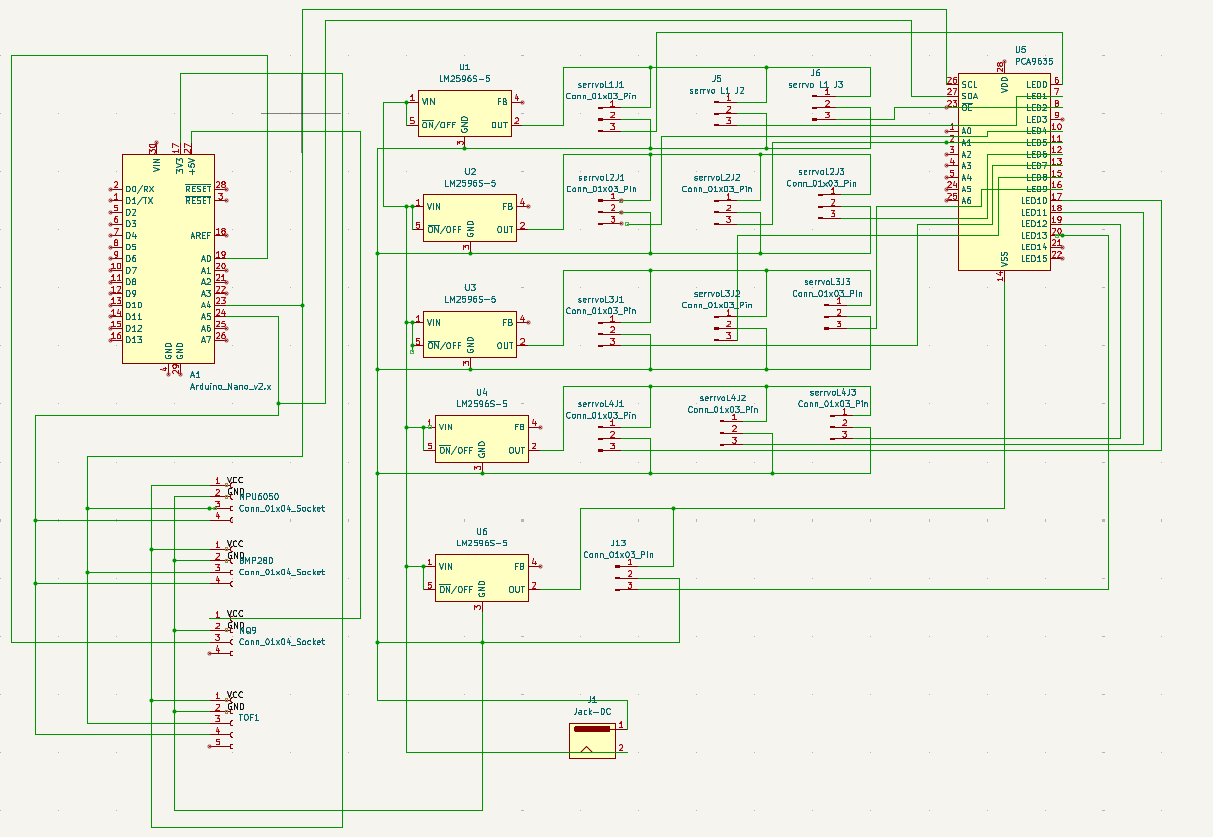
**自定义PCB**:专门设计的电路板,集成电机驱动、电源管理和控制逻辑
**Arduino平台**:使用广泛普及的Arduino微控制器,降低入门门槛
**模块化结构**:机械和电子部分均采用模块化设计,便于维护和升级
技术规格
| 机器人类型 | 四足机器人(Quadruped) |
|---|---|
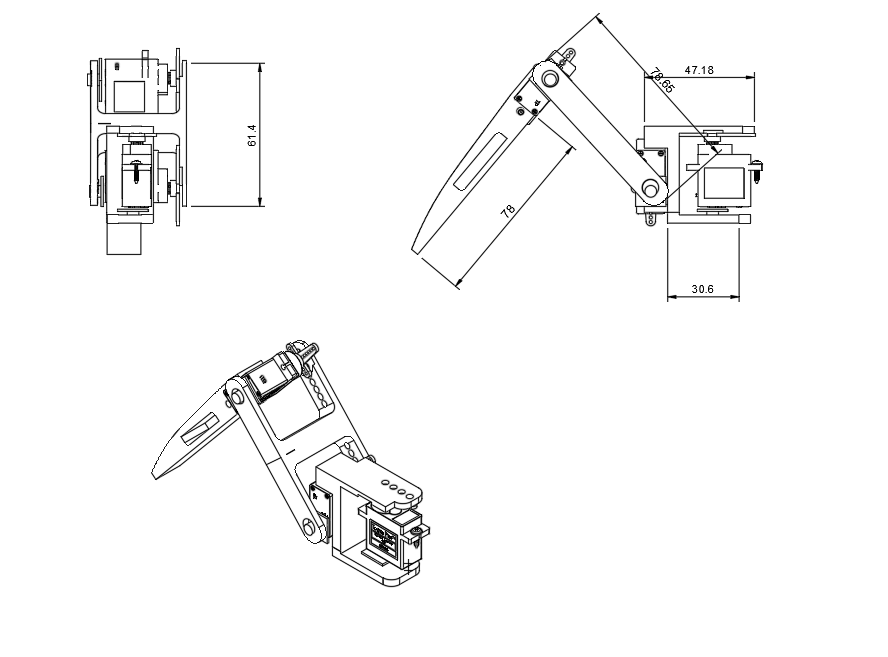
| 腿部设计 | 角腿(Angular leg) |
| 控制平台 | Arduino |
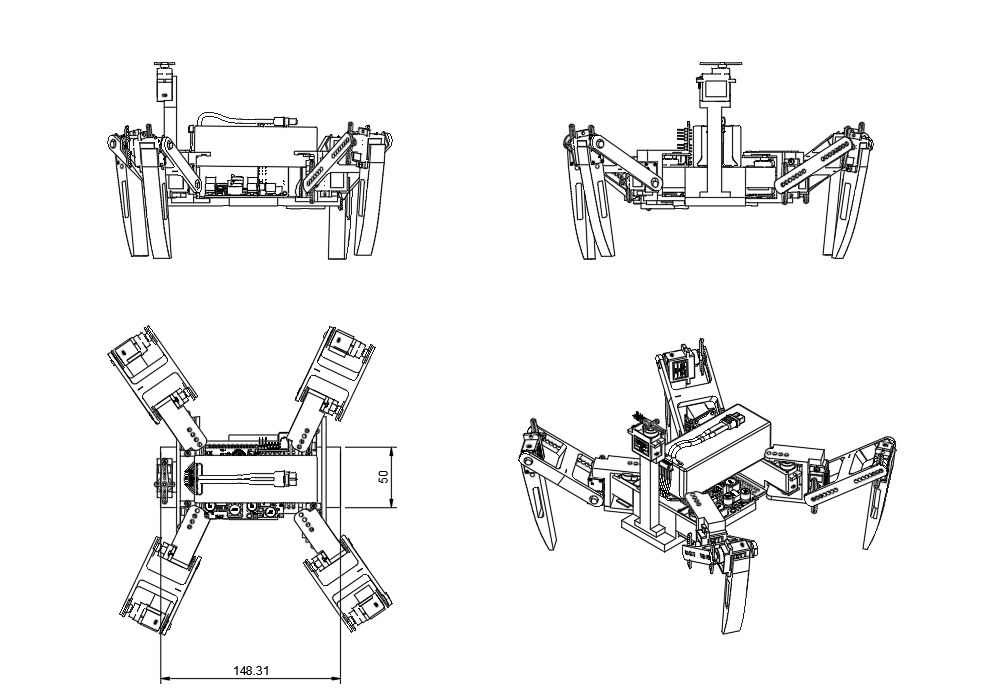
| 机械设计 | 自定义CAD(3D打印件) |
| 电子电路 | 自定义PCB |
| 固件 | 基于Arduino的行走控制程序 |
| 自由度 | 每腿2个自由度(推测) |
| 驱动方式 | 伺服电机(推测) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印腿部零件 | 1套 | — | 需自行打印 |
| 3D打印机身框架 | 1套 | — | 需自行打印 |
| Arduino开发板 | 1 | — | 主控制器 |
| 伺服电机 | 8 | — | 每腿2个 |
| 自定义PCB | 1 | — | 需自行打样 |
| 电源模块 | 1 | — | 电池供电 |
| 电池 | 1 | — | 7.4V或11.1V锂电 |
| 螺丝、螺母、轴承 | 1套 | — | 标准五金件 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要熟练使用3D打印机、焊接工具和螺丝刀进行机械组装和电子焊接
💻 **编程能力**:需要掌握Arduino编程基础,能够修改和上传固件代码
⚡ **电子电路**:需要理解基本电路原理,能够调试PCB和伺服电机控制系统
适用场景
**机器人教育**:作为高校或职业院校机器人课程的实践项目
**开源硬件研究**:供机器人爱好者研究四足机器人的运动控制和机械设计
**创客项目**:适合有经验的创客进行二次开发和改造
**科研验证**:可用于验证角腿结构的运动性能和步态算法