待补充
autowarefoundation/autoware_vision_pilot
机器人, 车载/ADAS
3/5
🧩 软硬件结合
已发布
项目简介
Free self-driving car stack - fully open-source ADAS and autonomous driving system
Vision Pilot 是由 Autoware 基金会推出的一个完全开源、可商用的高级驾驶辅助系统(ADAS)与全自动驾驶软件栈。该项目旨在为全球乘用车提供安全、可量产且易于认证的自动驾驶能力,并已与多家汽车 OEM 和 Tier-1 供应商展开集成合作。其核心亮点在于采用了端到端的人工智能架构,系统中的感知、决策与控制等关键模块均由神经网络驱动,并计划逐步推出基于组件的端到端 AI、完整端到端 AI 以及混合端到端 AI 方案,以兼顾系统的可解释性、可验证性与安全性。与传统方案不同,Vision Pilot 不依赖高精度 3D 地图,仅通过实时视觉感知即可在无地图模式或普通导航地图(ADAS 地图)下运行,模仿人类驾驶方式。技术栈方面,项目基于 PyTorch 进行模型训练与推理,结合 OpenCV 处理视觉数据,并深度集成 ROS 2 以实现模块化通信与系统调度。项目采用 Apache 2.0 许可证,所有模型架构、数据解析脚本、训练流程及模型权重均免费开放。Vision Pilot 解决了传统自动驾驶方案成本高昂、依赖高精地图、难以量产落地等核心痛点,特别适用于高速公路单车道领航、城市道路自动驾驶以及 L4 级全场景无人驾驶等场景。通过循序渐进的版本迭代,该项目正逐步降低自动驾驶技术的准入门槛,推动安全、可靠的自动驾驶技术在全球范围内的普及。
标签
项目特点
**端到端 AI 架构**:感知、决策与控制模块均由神经网络驱动,减少传统规则系统的复杂性。
**无高精地图依赖**:仅通过实时视觉感知即可运行,支持无地图模式或普通导航地图。
**可量产与可认证**:与多家汽车 OEM 和 Tier-1 供应商合作,注重安全性与认证合规性。
**多方案演进**:计划逐步推出基于组件的端到端 AI、完整端到端 AI 以及混合端到端 AI 方案,兼顾可解释性与安全性。
**完全开源与可商用**:基于 Autoware 基金会生态,代码完全开放,允许商业使用。
**集成合作生态**:已与多家汽车制造商和一级供应商开展集成合作,具备实际落地潜力。
技术规格
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA Jetson AGX Orin | 1 | — | 推荐用于实时推理 |
| 前视双目摄像头(如 AR0231) | 2 | — | 用于视觉感知 |
| 环视摄像头(如 OV10640) | 4 | — | 用于 360° 感知 |
| CAN 接口卡(如 Kvaser) | 1 | — | 用于车辆控制 |
| SSD(≥256GB) | 1 | — | 用于系统与数据存储 |
| 12V/24V 车载电源模块 | 1 | — | 适配车辆电源系统 |
能力画像
**记忆与知识检索**:2/5 — 项目不依赖外部知识库,但需理解自动驾驶与神经网络基础。
**动手与操作**:4/5 — 需要实际搭建硬件平台、连接传感器与车辆接口。
**编程与算法**:5/5 — 核心为神经网络编程、C++/Python 开发、ROS 2 节点编写。
**设计与建模**:3/5 — 涉及系统架构设计,但已有参考实现,无需从零建模。
**实验与调试**:4/5 — 需在仿真与实车上反复调试感知与决策模型。
**协作与分享**:3/5 — 开源社区协作,但需理解 Autoware 贡献流程。
**学习与研究**:4/5 — 需持续跟踪端到端自动驾驶前沿论文与技术。
**系统集成**:5/5 — 需集成传感器、计算平台、车辆控制与软件栈。
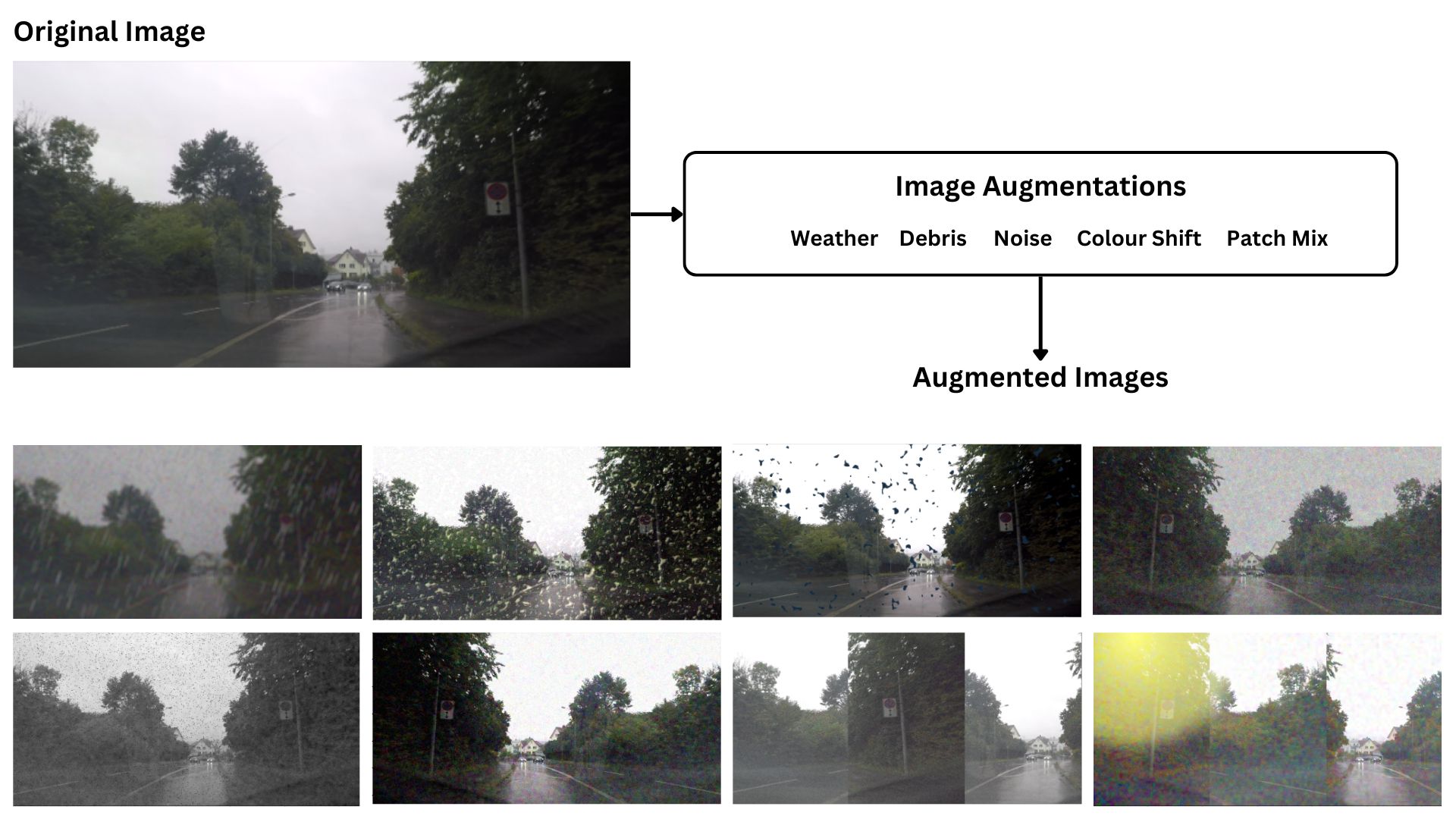
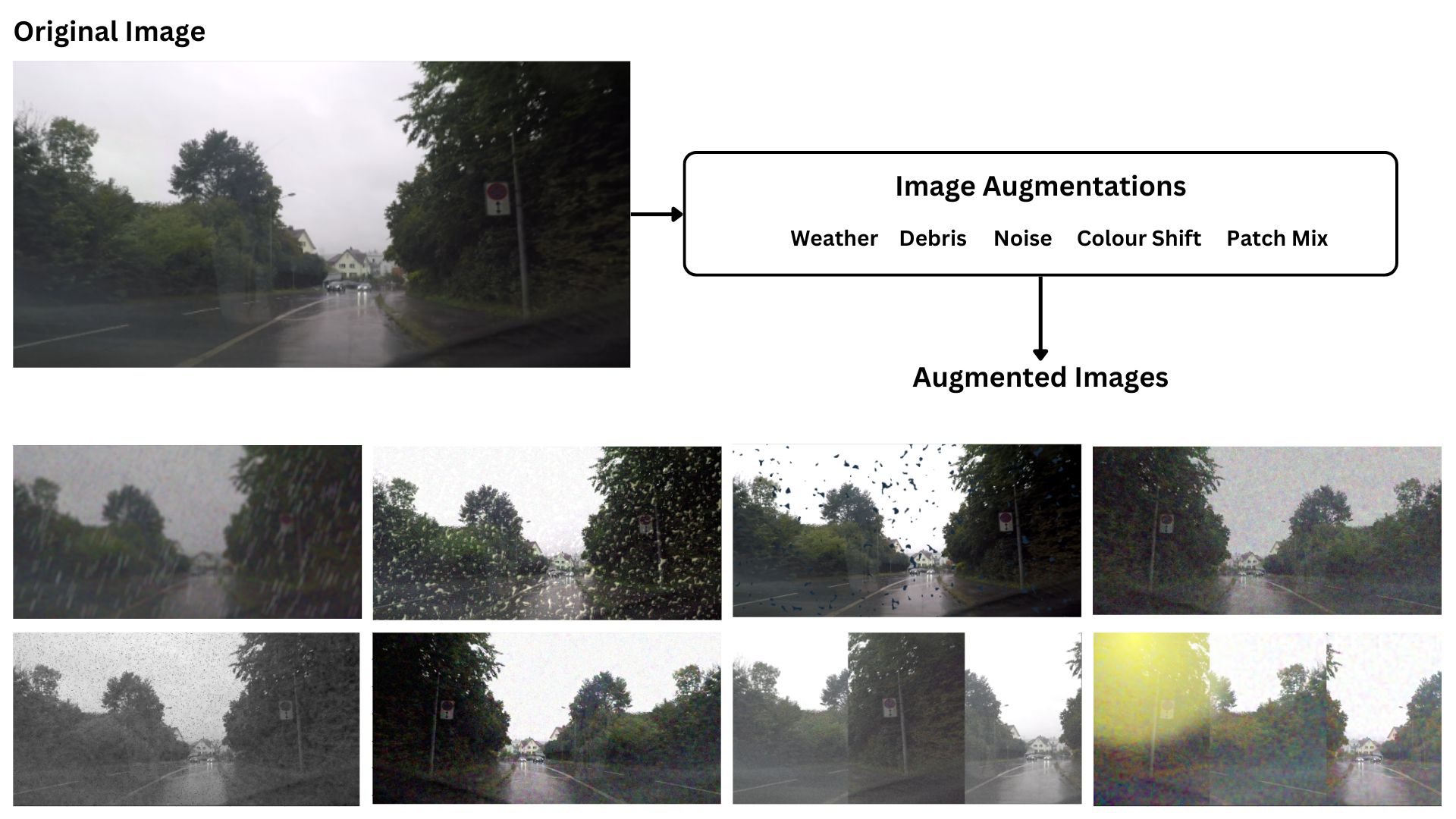
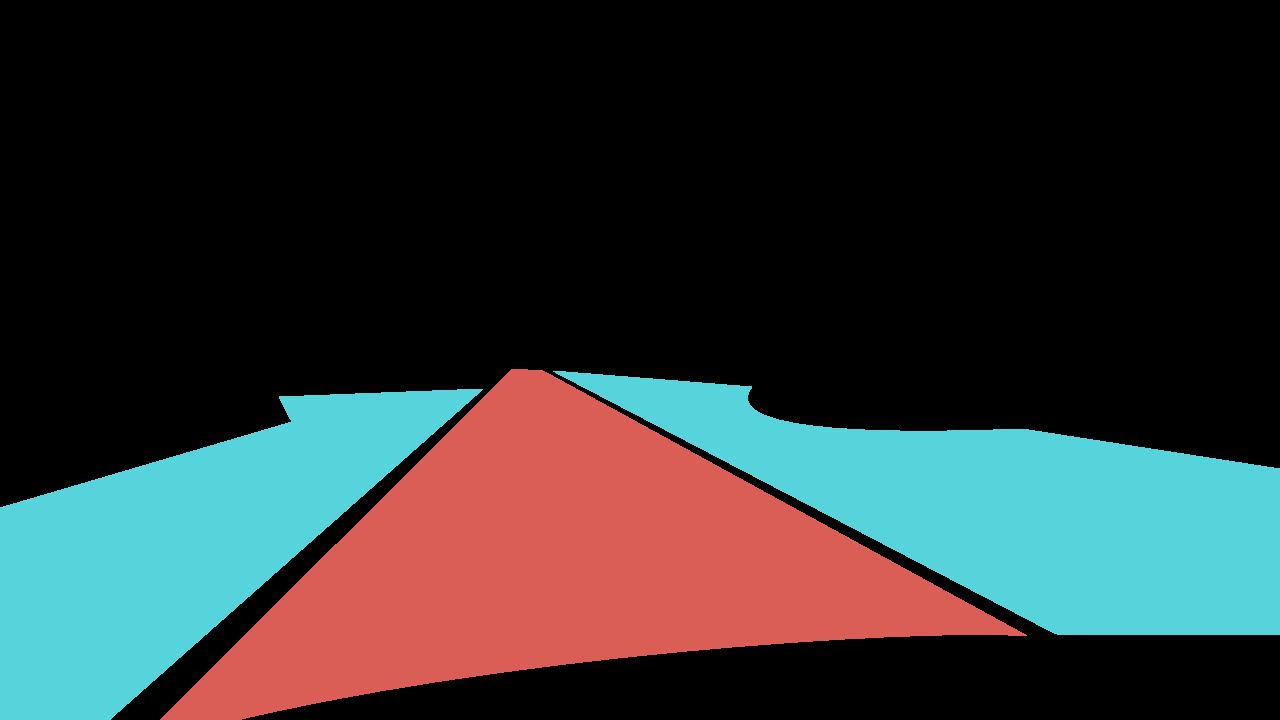
项目图库



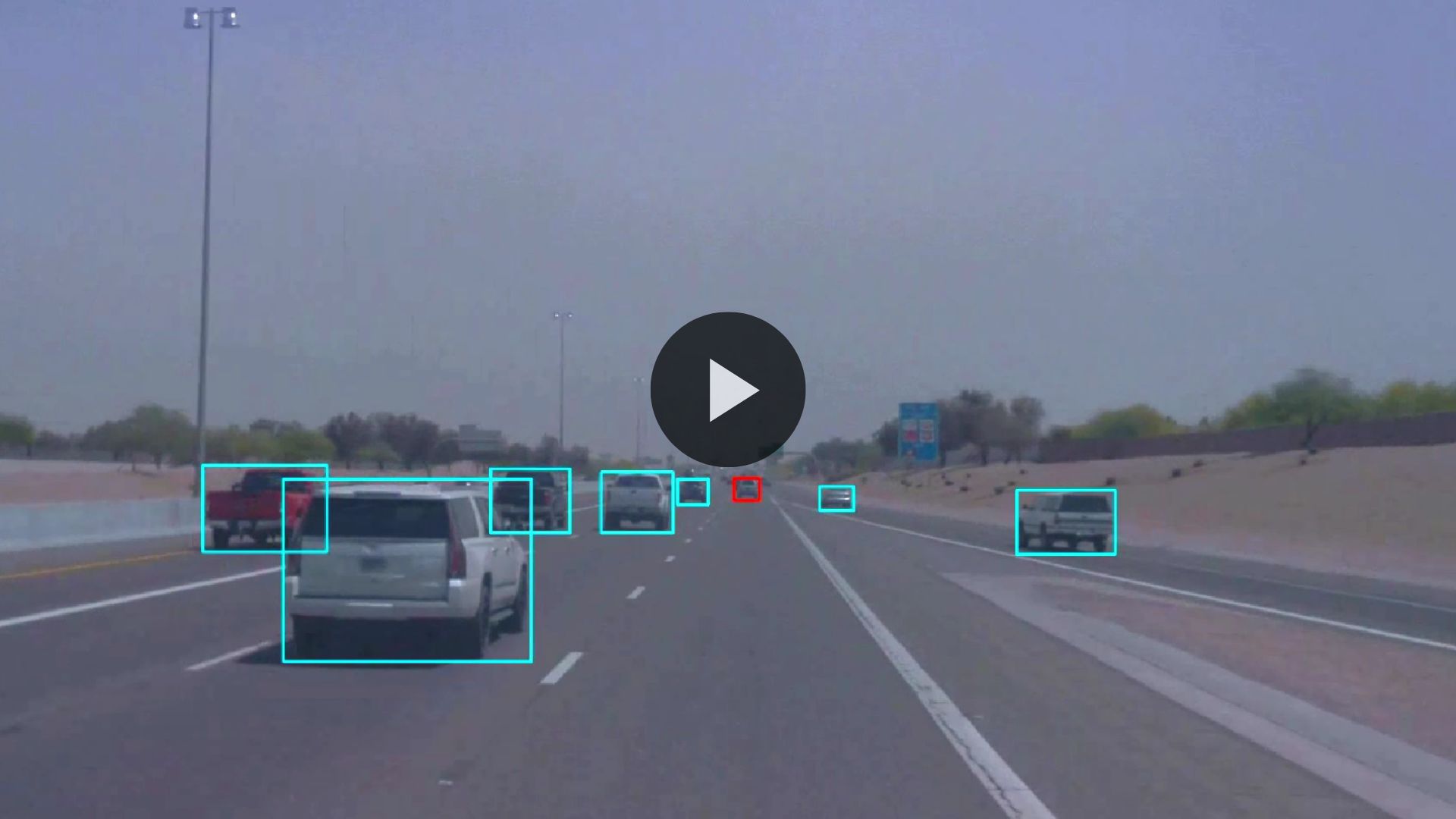




视频
所需技能
自动驾驶基础知识(感知、规划、控制)
深度学习与神经网络(PyTorch / TensorRT)
C++ 与 Python 编程
ROS 2 开发与调试
嵌入式系统与 GPU 编程(CUDA)
车辆通信协议(CAN / Ethernet)
传感器标定与数据采集
版本控制(Git)与容器化(Docker)
适用场景
乘用车 ADAS 功能开发(如自动紧急制动、车道保持)
全自动驾驶原型车研发与测试
自动驾驶算法研究与学术实验
汽车 OEM 与 Tier-1 供应商的集成验证
开源自动驾驶社区贡献与二次开发
智能网联汽车课程教学与实训