多源多传感器融合定位
Multi_Sensor_Fusion
智能家居
3/5
🧩 软硬件结合
已发布
项目简介
Multi-Sensor Fusion (GNSS, IMU, Camera) 多源多传感器融合定位 GPS/INS组合导航 PPP/INS紧组合
Multi-Sensor Fusion (GNSS, IMU, Camera) 多源多传感器融合定位 GPS/INS组合导航 PPP/INS紧组合
标签
项目特点
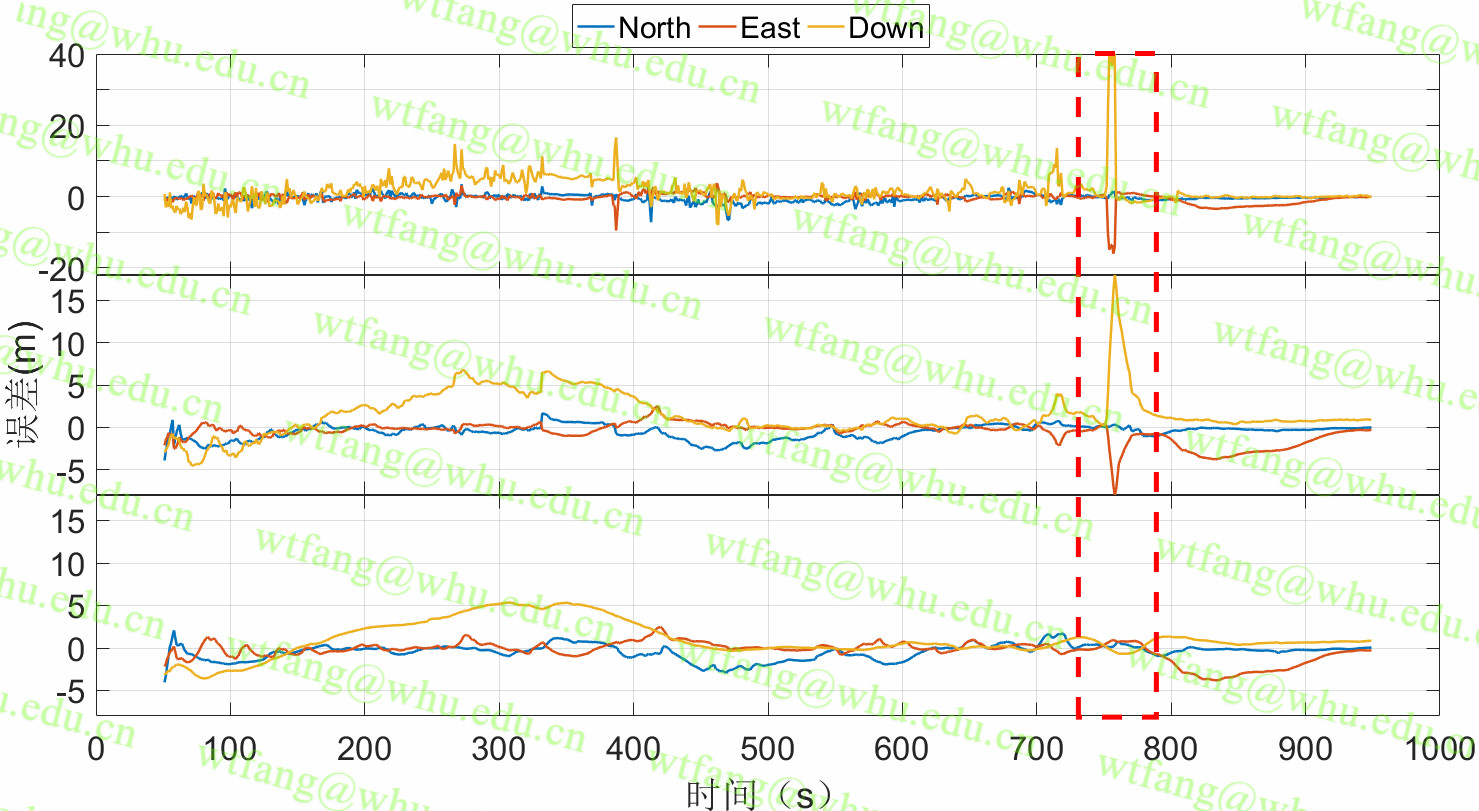
**多源融合**:支持GNSS(GPS+BDS)、IMU(MEMS惯导)和Camera(视觉)三种传感器的数据融合。
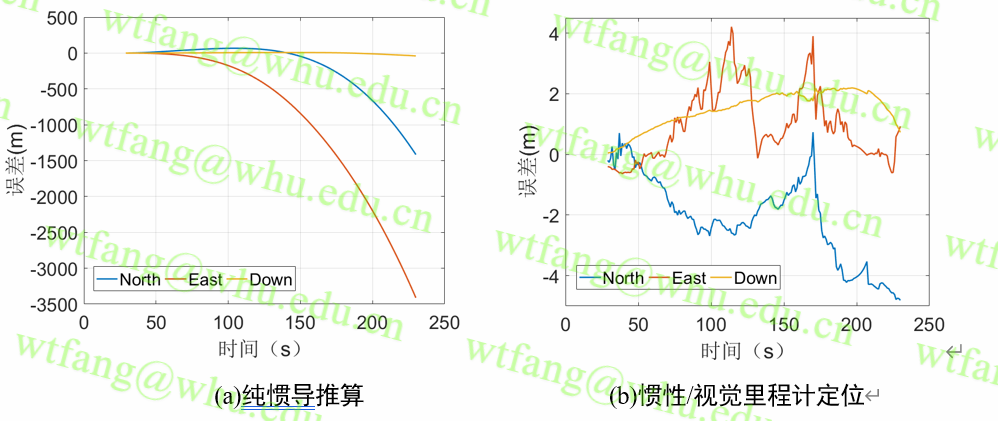
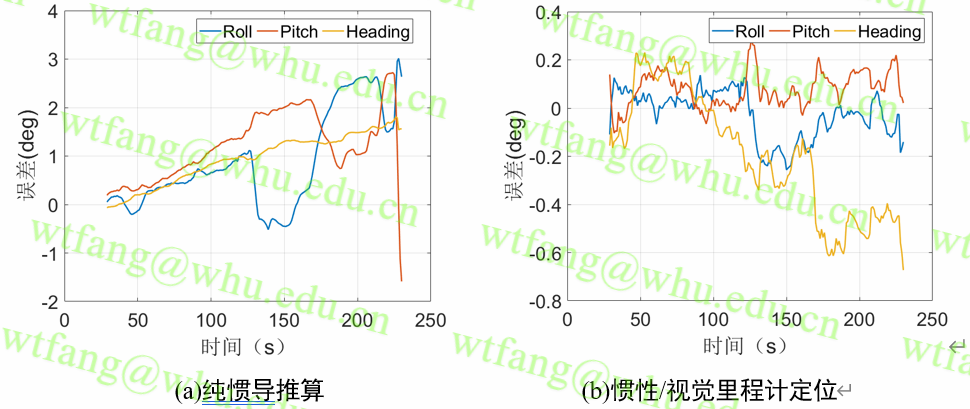
**多种解算模式**:支持GNSS/INS松组合、GNSS/INS/Camera紧组合、纯惯导推算和VIO解算。
**基于PPP技术**:采用精密单点定位(PPP)技术,不依赖地面基准站,降低了成本和操作难度。
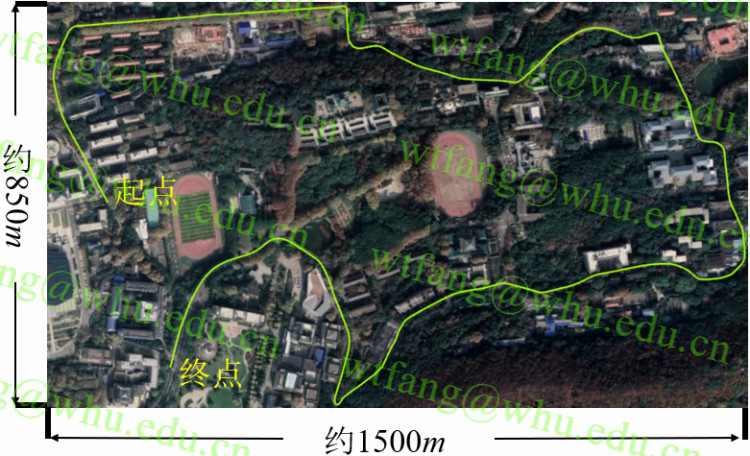
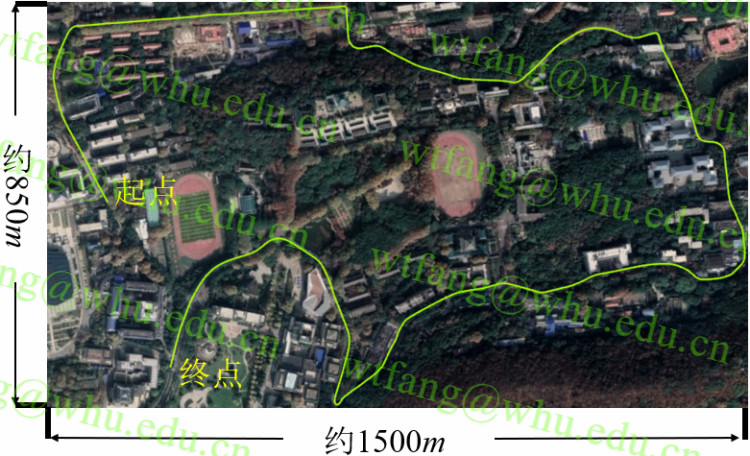
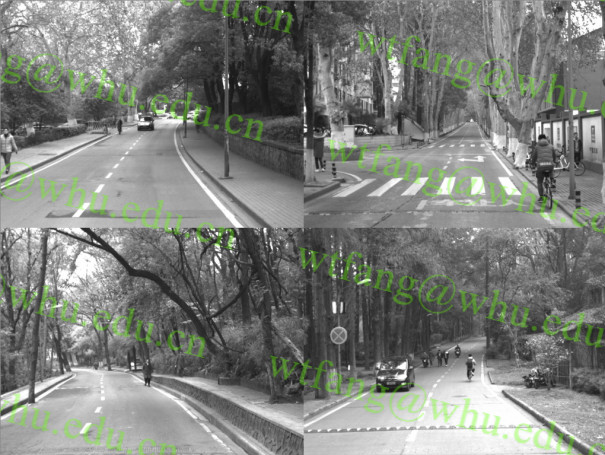
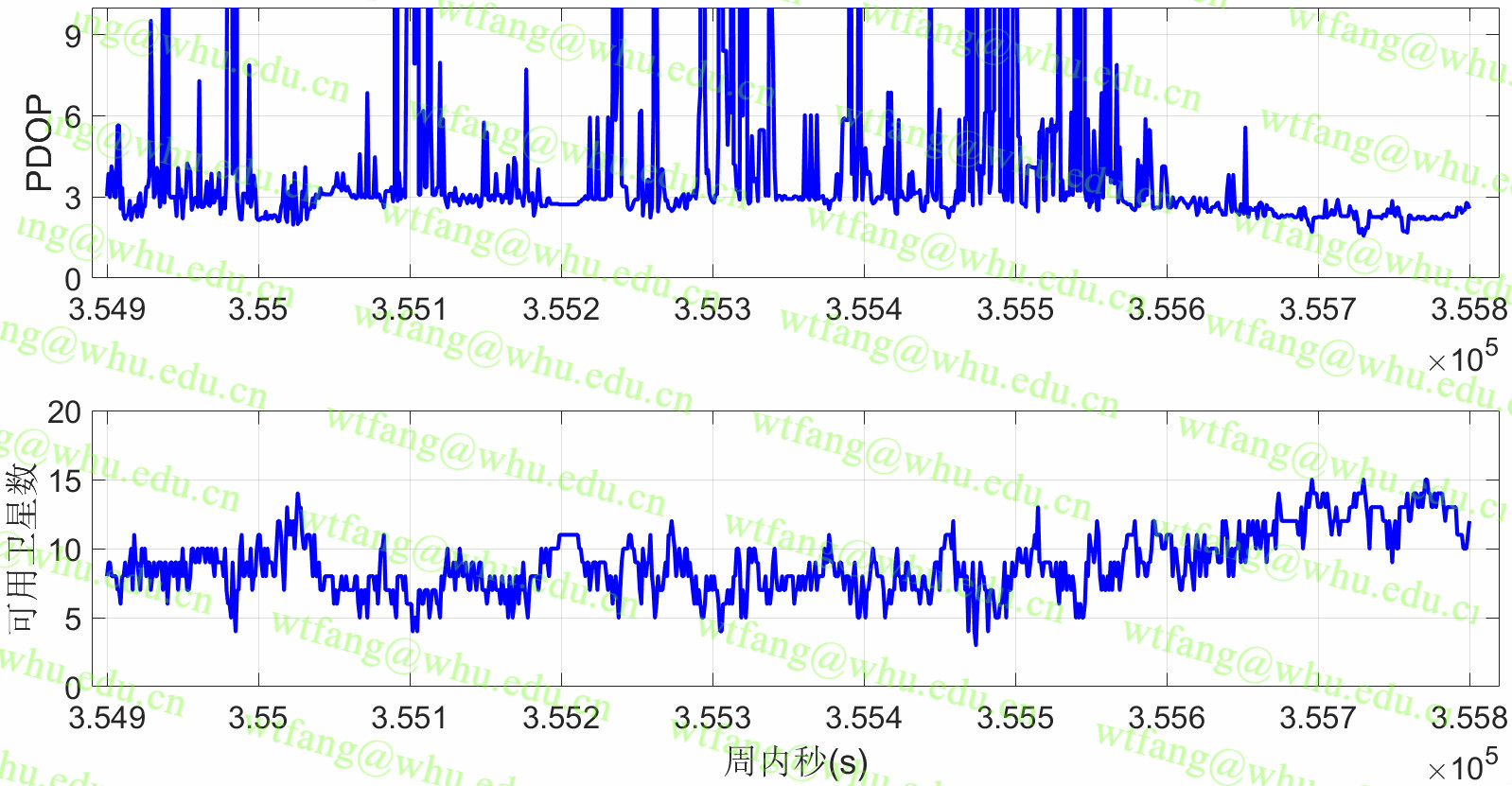
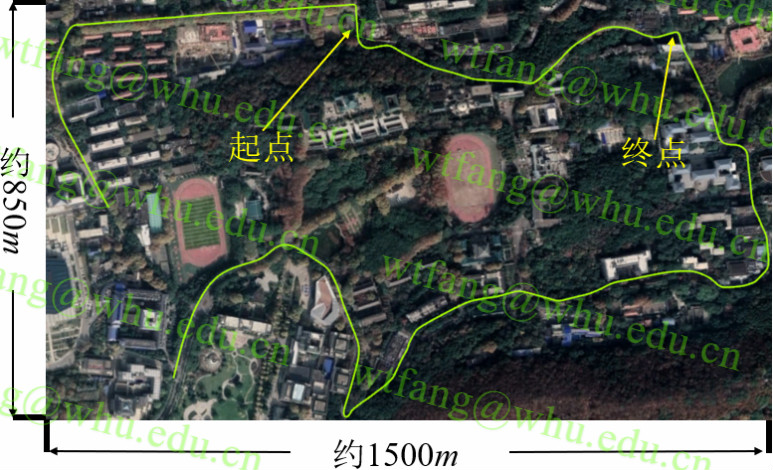
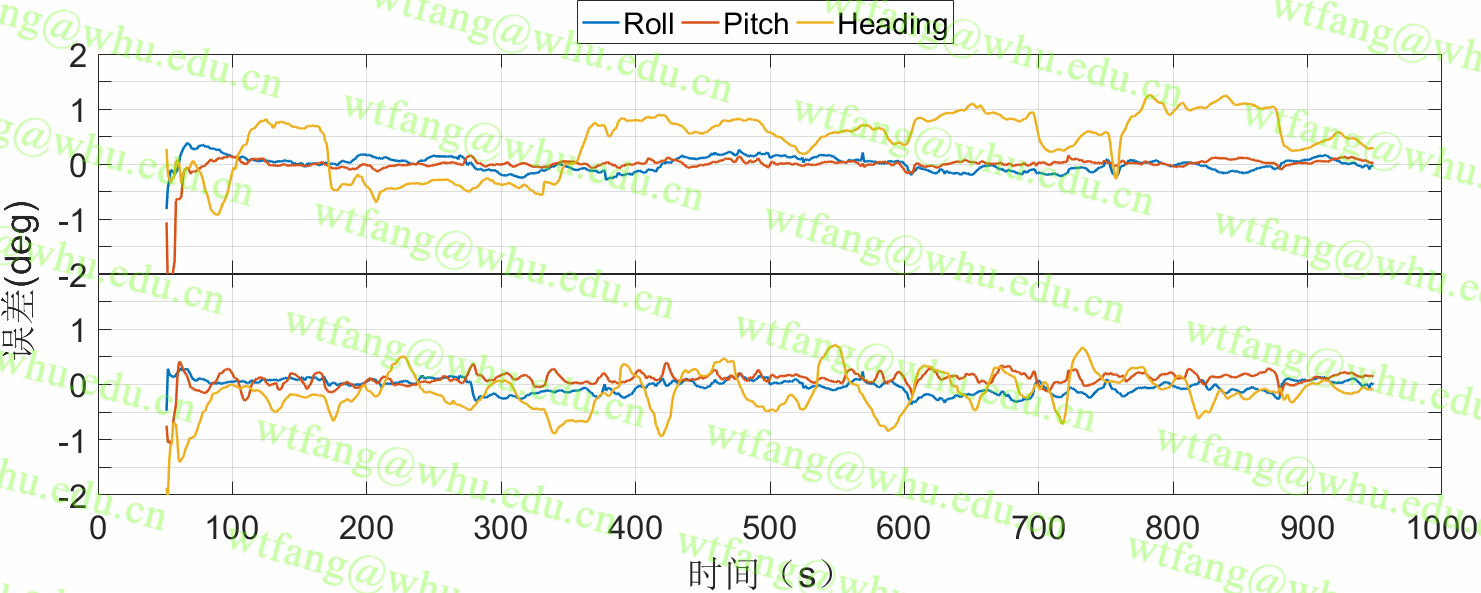
**真实数据验证**:提供了在武汉大学校园内采集的真实环境数据,并给出了详细的定位和定姿误差分析结果。
**学术背景**:项目源于作者的博士论文研究,具有扎实的理论基础。
技术规格
| 支持的传感器 | GNSS (GPS+BDS), IMU (MEMS), Camera |
|---|---|
| 融合算法 | 松组合、紧组合 |
| 定位技术 | PPP (精密单点定位) |
| 视觉里程计 | 基于VIO,需GNSS初始化 |
| 编程语言 | C++ |
| 核心依赖 | glog, Eigen, OpenCV 3.4, Ceres 1.14.0 |
| 代码架构 | 包含config, doc, exec, include, src, tools等模块 |
| 版本管理 | 使用Git submodules管理工具库 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 支持GNSS、IMU、Camera的数据采集平台 | 1 | — | 用于采集测试数据,具体型号未指定 |
| Ubuntu/Linux操作系统 | 1 | — | 开发和运行环境 |
| glog | 1 | — | 日志库 |
| Eigen | 1 | — | 线性代数库 |
| OpenCV 3.4 | 1 | — | 计算机视觉库 |
| Ceres 1.14.0 | 1 | — | 非线性优化库 |
| 示例数据集 | 1 | — | 百度云下载,解压密码:123456 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 5/5
⚪ 动手与操作: 3/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要能够搭建或获取包含GNSS、IMU和Camera的数据采集平台,并处理数据。
💻 **编程能力**:需要精通C++编程,熟悉CMake构建系统,并能理解和使用Eigen、OpenCV、Ceres等库。
⚡ **电子电路**:需要了解传感器(GNSS、IMU、Camera)的基本工作原理和数据接口。
适用场景
**学术研究**:用于组合导航、多传感器融合、SLAM等领域的算法研究和验证。
**自动驾驶**:为无人车、机器人等提供高精度、高可靠性的定位解决方案。
**无人机导航**:在GNSS信号受限环境下,通过视觉和惯导辅助实现持续定位。
**个人学习**:适合对多传感器融合定位技术有浓厚兴趣,并希望深入实践的学习者。