端到端自动驾驶
End-to-end-Autonomous-Driving
3/5
🧩 软硬件结合
已发布
项目简介
[IEEE T-PAMI 2024] All you need for End-to-end Autonomous Driving
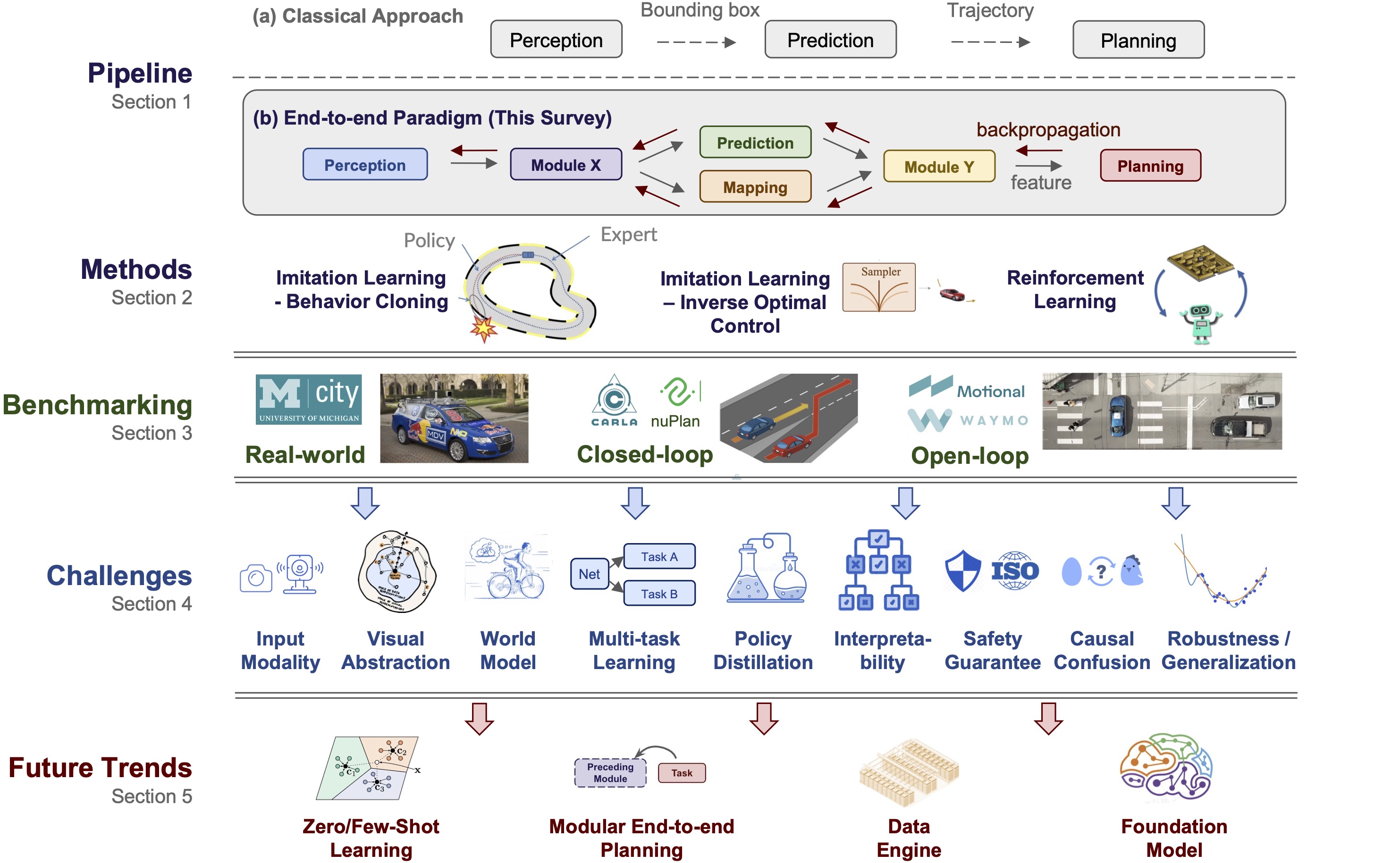
End-to-end Autonomous Driving 是一个面向自动驾驶研究社区的开源资源聚合项目,由 OpenDriveLab、上海人工智能实验室、香港大学及图宾根大学等机构的研究者共同维护。该项目旨在为端到端自动驾驶研究提供一站式资源库,核心定位是“你进行端到端自动驾驶研究所需的一切”。
标签
项目特点
**全面的论文合集**:收录270+篇论文,按主题分类(如VLM驾驶、世界模型、BEV、Transformer等),并持续更新。
**权威的基准测试**:提供CARLA Leaderboard、nuPlan、NAVSIM等主流闭环和开环基准测试的入口和指南。
**年度挑战赛**:组织CVPR、NeurIPS等顶会上的自动驾驶挑战赛,推动社区发展。
**学习资源丰富**:包含在线课程、顶级会议教程和专家讲座视频,适合不同层次的学习者。
**社区驱动**:鼓励通过PR贡献,提供Slack社区交流,保持资源的最新和活跃。
技术规格
| 项目类型 | 研究资源集合(论文、基准、挑战) |
|---|---|
| 覆盖论文数 | 270+ |
| 主要基准 | CARLA Leaderboard 1.0/2.0, nuPlan, NAVSIM |
| 主要挑战赛 | CVPR 2024 End-to-End Driving at Scale, CARLA Challenge |
| 许可证 | MIT |
| 维护方 | OpenDriveLab, Shanghai AI Lab |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python | 1 | — | 推荐3.8+ |
| PyTorch | 1 | — | 用于模型训练和推理 |
| CARLA Simulator | 1 | — | 闭环仿真环境 |
| nuScenes/nuPlan 数据集 | 1 | — | 开环训练和评估 |
| GPU (NVIDIA RTX 3090或更高) | 1 | — | 用于模型训练 |
| 高性能工作站/服务器 | 1 | — | 处理大规模数据 |
能力画像
⚪ 记忆与知识检索: 5/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 3/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 3/5
⚪ 狂热与坚持: 5/5
⚪ 创造与创新: 4/5
项目图库

视频
所需技能
🔧 **动手能力**:需要能够搭建深度学习环境,配置CARLA仿真器,运行和调试代码。
💻 **编程能力**:精通Python,熟悉PyTorch,能够理解和修改深度学习模型代码。
⚡ **电子电路**:不涉及硬件电路,但需要理解传感器(相机、激光雷达)数据格式和融合原理。
适用场景
**学术研究**:作为端到端自动驾驶领域的文献综述和基准测试参考。
**课程教学**:用于自动驾驶相关课程的论文阅读、项目实践和竞赛参与。
**工业研发**:为自动驾驶公司提供技术路线参考和最新算法评估。
**个人学习**:初学者可以通过学习材料和教程入门,进阶者可以参与挑战赛。