OpenMower - 人人可用的DIY智能割草机器人
OpenMower
机器人
3/5
🧩 软硬件结合
已发布
项目简介
Let's upgrade cheap off-the-shelf robotic mowers to modern, smart RTK GPS based lawn mowing robots!
OpenMower是一个开源DIY智能割草机器人项目,旨在打破传统割草机器人“随机碰撞+边界线”的落后设计,让每个人都能用低成本打造一台真正智能、地图可控的割草设备。项目的核心理念是:拆解市面上最便宜的成品割草机器人(如YardForce Classic 500),用自研硬件和开源软件替换其“大脑”,将其从盲目的随机行走机器,升级为具备GPS导航、区域地图管理、手机App遥控的智能割草机。
标签
项目特点
**自主割草**:机器人自动完成草坪割草任务。
**高安全性**:抬起或碰撞时紧急停止。
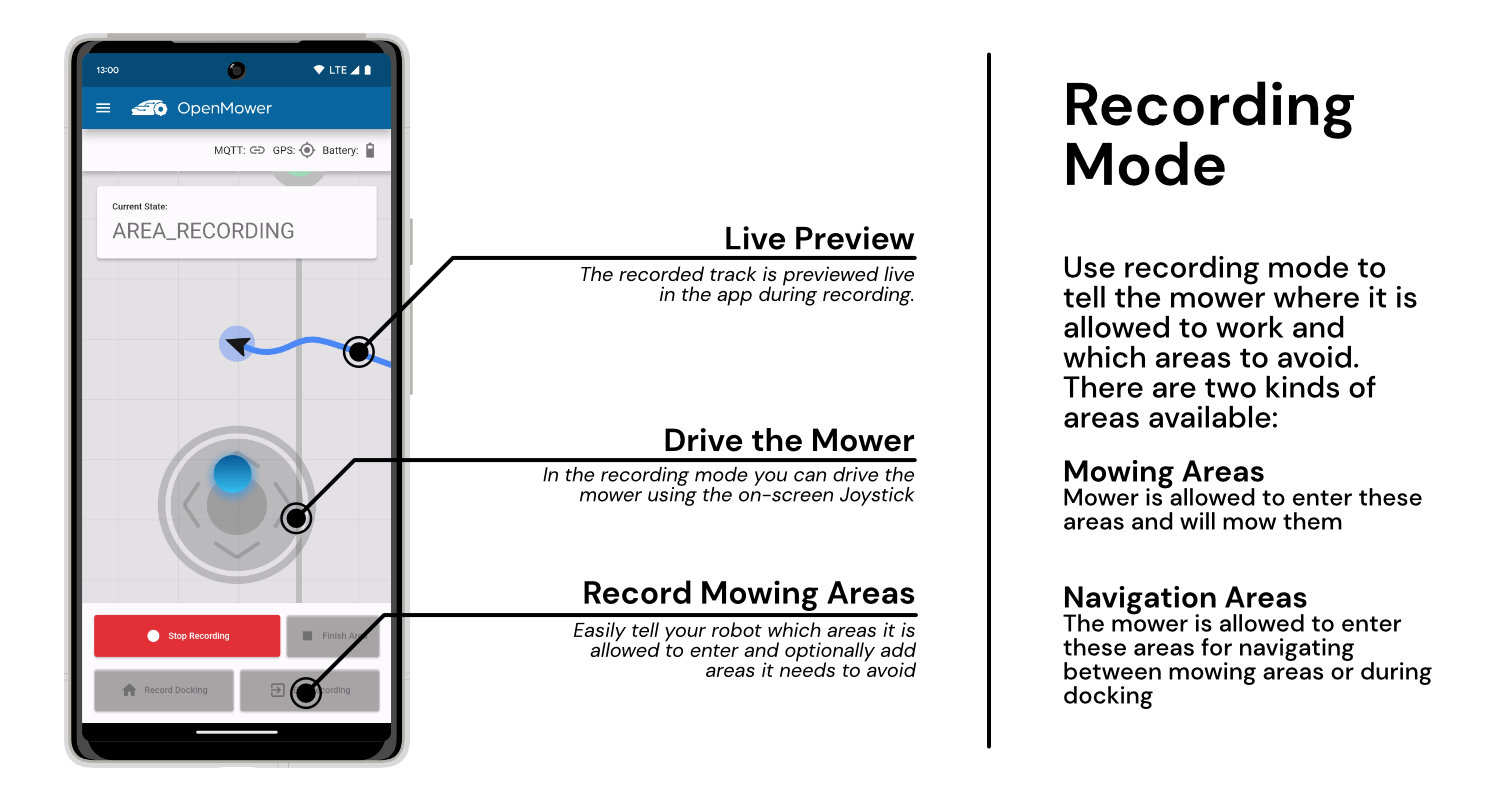
**无需边界线**:基于 RTK GPS 导航,支持多个割草区域灵活切换。
**低成本**:总成本低于中端商用产品。
**完全开源**:分享知识,鼓励他人自行构建。
**外观美观**:改造后外观整洁,不显廉价。
**避障功能**:检测并避开障碍物。
**雨天检测**:检测恶劣天气并暂停工作,待天气好转后继续。
技术规格
| 导航方式 | RTK GPS(实时动态差分定位) |
|---|---|
| 控制核心 | 自定义主控板(基于 STM32 等 MCU) |
| 软件框架 | ROS(机器人操作系统) |
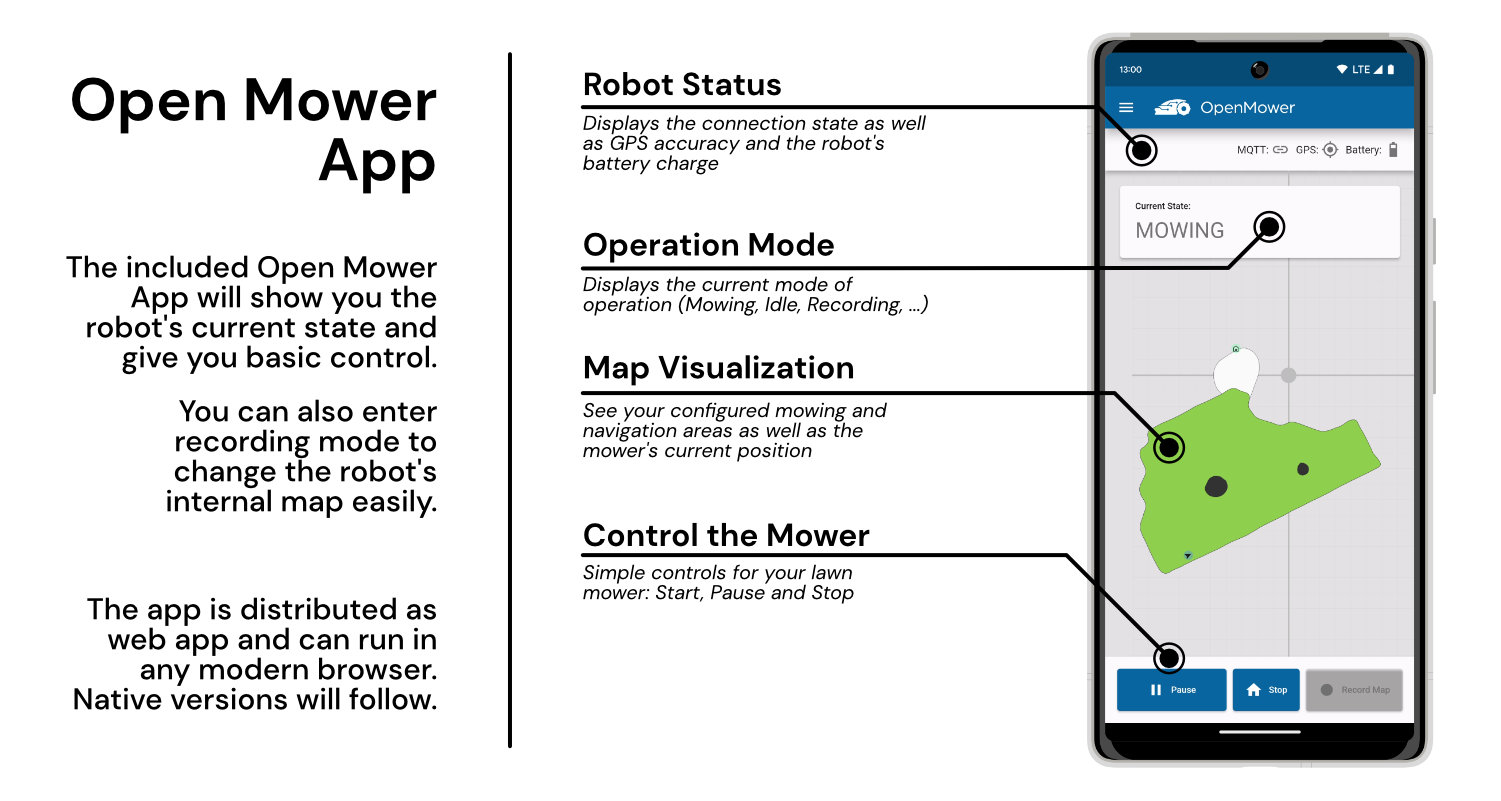
| 通信方式 | Wi-Fi / 蓝牙(通过手机 App 控制) |
| 电机驱动 | xESC 固件驱动无刷电机 |
| 传感器 | 碰撞传感器、抬升传感器、雨量传感器、GPS 模块 |
| 兼容机型 | YardForce Classic 500 及同平台机型(如 Herkules 等) |
| 电源 | 原装电池(通常 24V 锂电池) |
| 工作区域 | 无边界线,支持多个自定义区域 |
| 安全机制 | 抬起/碰撞紧急停止 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 兼容割草机器人(如 YardForce Classic 500) | 1 | — | 需确认兼容性 |
| RTK GPS 接收器(含基站) | 1 | — | 约 €700 预算 |
| 主控板(OpenMower 通用版或专用版) | 1 | — | 需自行焊接或购买成品 |
| 树莓派或类似 SBC | 1 | — | 运行 ROS 和 App |
| 电机驱动器(xESC) | 2 | — | 驱动左右轮电机 |
| 碰撞传感器 | 2 | — | 前后各一 |
| 抬升传感器 | 1 | — | 检测机器人被抬起 |
| 雨量传感器 | 1 | — | 可选 |
| 电源模块(降压/稳压) | 1 | — | 适配原装电池 |
| 3D 打印外壳/支架 | 若干 | — | 用于固定电子模块 |
| 杜邦线、电源线、信号线 | 若干 | — | 连接各模块 |
| 焊台、螺丝刀、万用表等 | 1套 | — | 组装与调试 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 2/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 3/5
项目图库
视频
所需技能
🔧 **动手能力**:需要熟练使用焊台、螺丝刀等工具,能够拆解和改装割草机器人,并自行焊接主控板和传感器模块。
💻 **编程能力**:需要具备 Linux 系统基础操作能力,能够配置 ROS 环境、烧录固件、调试软件。了解 C++/Python 有助于自定义功能。
⚡ **电子电路**:需要理解基本电路原理,能够使用万用表检测电路,了解电源管理、传感器接口和电机驱动原理。
适用场景
**家庭草坪维护**:将普通割草机器人升级为智能割草机,实现自动化草坪修剪。
**DIY 机器人学习**:作为学习 ROS、GPS 导航、嵌入式系统的实践项目。
**开源硬件社区**:为开源机器人社区提供完整的参考设计和构建经验。
**农业/园林自动化**:在小型农场或园林中部署低成本智能割草方案。