RoboMotor 开源电机驱动项目
RoboMotor
机器人电机驱动板
4/5
🧩 软硬件结合
已发布
项目简介
开源电机控制器项目,功能完整。
一个完全开源的运动控制器项目。
标签
项目特点
**完全开源**:硬件设计(KiCad 8)和软件源代码(STM32G4)全部开放,遵循 MIT 许可证。
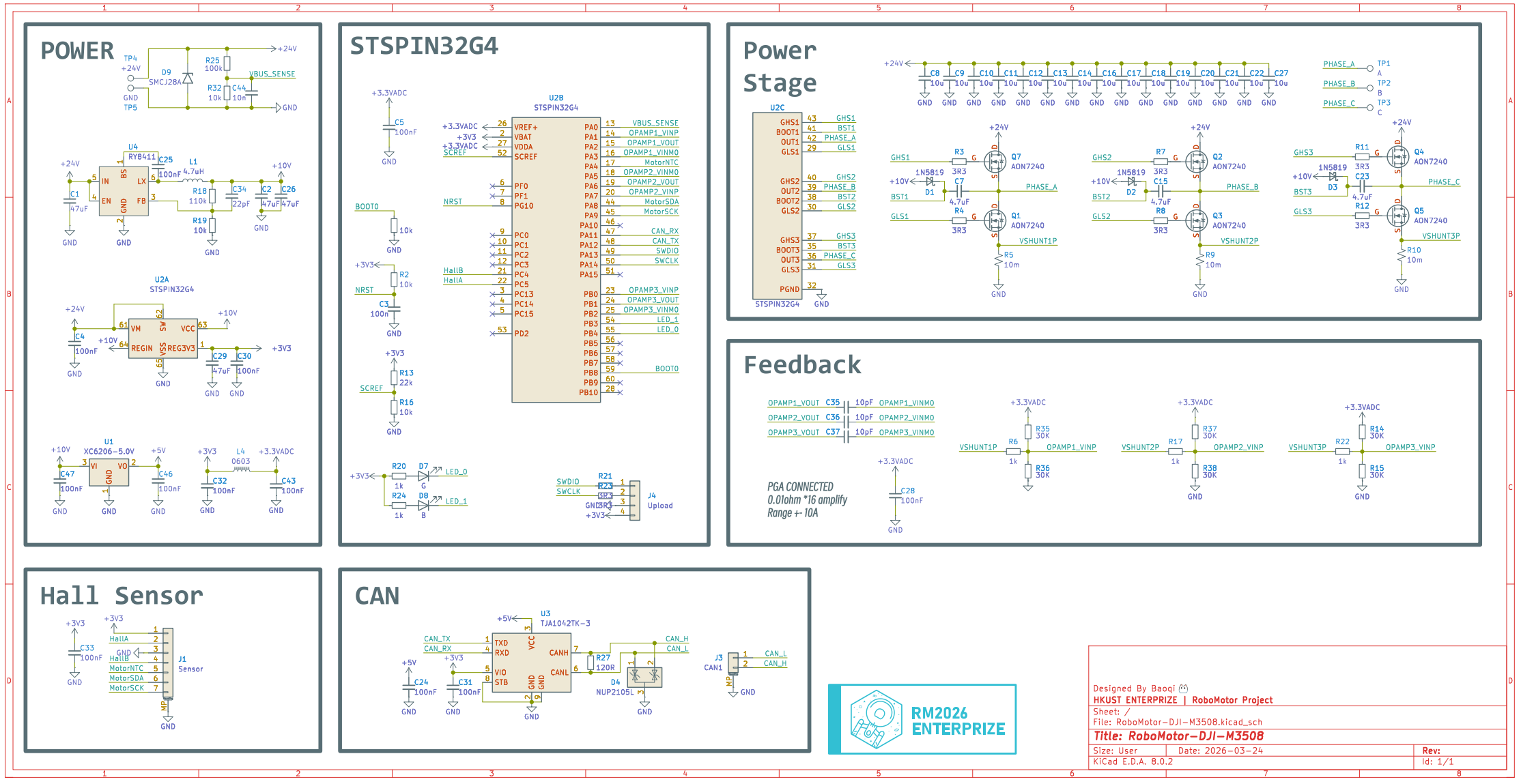
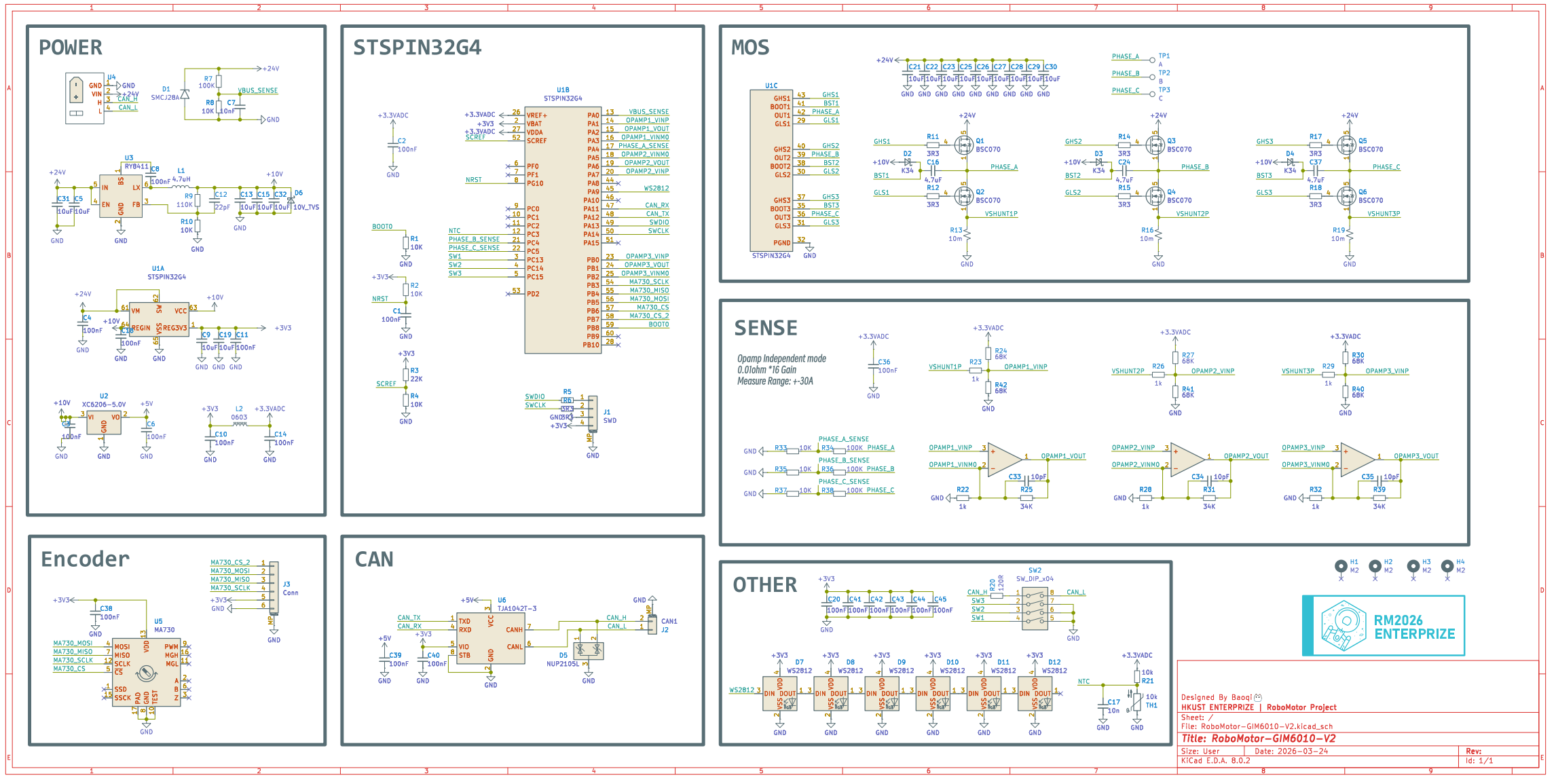
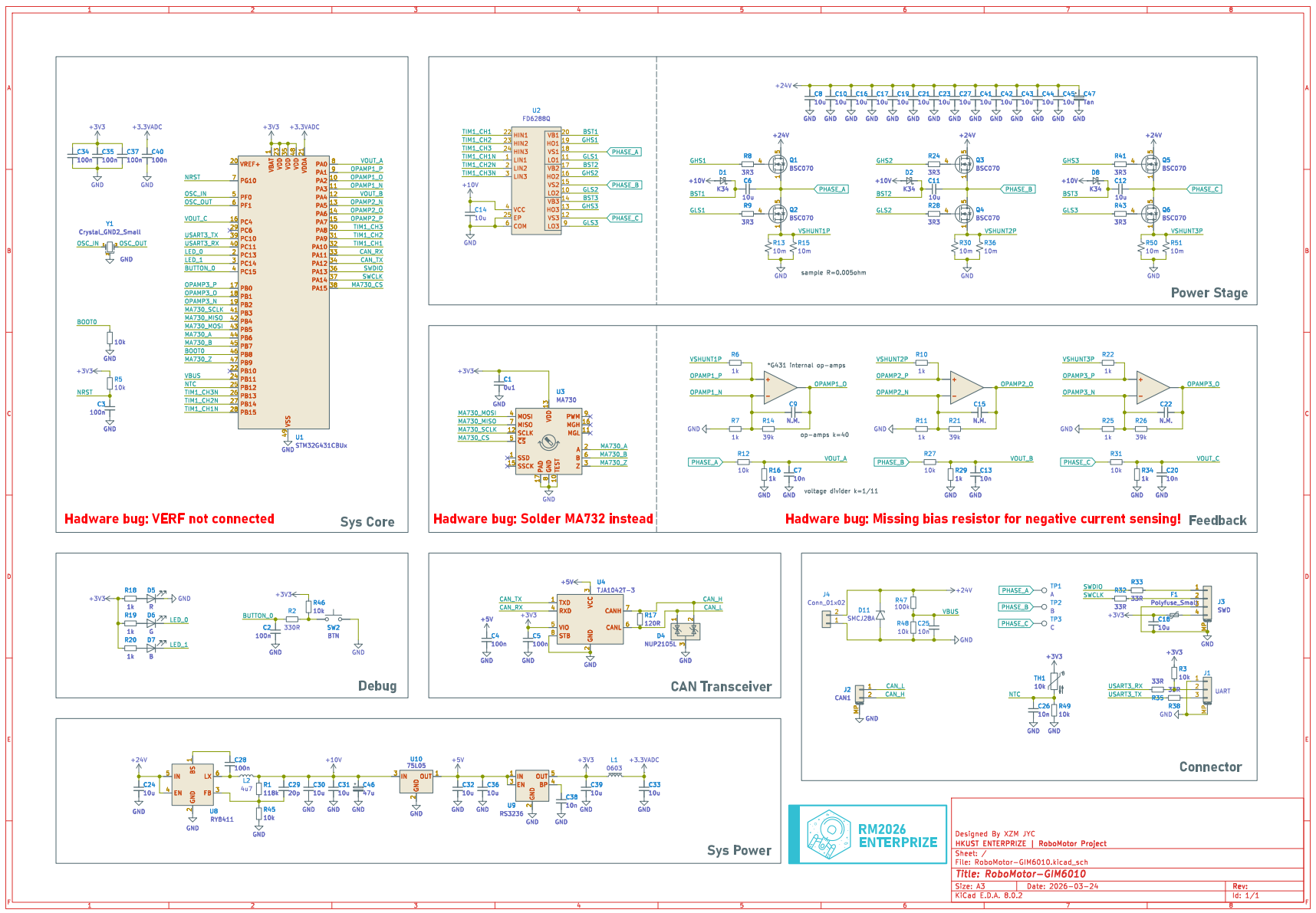
**高性能硬件**:支持 20A-40A 连续电流,4-6 层 PCB 设计,针对不同电机(如 DJI M3508、GIM6010)提供专用驱动板。
**先进控制算法**:实现基于传感器的 FOC,包含磁通/转矩解耦和反电动势前馈补偿。
**多环控制**:17kHz 电流内环 + 4kHz 速度外环 + 1kHz 位置环。
**丰富通信接口**:支持 CAN 总线(兼容 DJI RoboMaster 协议)和自定义协议,用于参数调整和遥测。
**实用功能**:包含自动校准(编码器偏移、电机参数识别)、安全机制(过流、过欠压、过温保护及自动恢复)和多种反馈支持(SPI 磁编码器、模拟输入)。
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| STSPIN32G4 / STM32G431 | 1 | — | 根据具体项目选择 |
| MOSFET (如 NTMFS5C410N) | 6 | — | 用于三相逆变桥 |
| FD6288 (部分项目) | 1 | — | 用于 RoboMotor-GIM6010 项目 |
| MA730 (部分项目) | 1 | — | 用于 RoboMotor-GIM6010-V2-Encoder 项目 |
| CAN 接口、电源接口、电机接口 | 若干 | — | 根据具体设计 |
| 电阻、电容、电感 | 若干 | — | 用于滤波、去耦、电源转换 |
| 4-6层定制PCB | 1 | — | 根据具体项目打样 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:需要熟练的 SMD 焊接技能,能够焊接 QFN 封装的 STSPIN32G4 和 MOSFET 等元件。需要能够使用示波器和逻辑分析仪进行硬件调试。
💻 **编程能力**:需要具备 C 语言和嵌入式系统开发经验,熟悉 STM32 系列微控制器的开发流程(如 STM32CubeMX、HAL 库)。理解 FOC 算法原理和实现是加分项。
⚡ **电子电路**:需要理解电机驱动电路(三相逆变桥)、电源电路、信号调理电路和 CAN 总线通信原理。能够阅读和理解原理图及 PCB 布局。
适用场景
**机器人竞赛**:如 RoboMaster 比赛,用于驱动底盘、云台等电机。
**机器人关节**:为协作机器人、仿生机器人等提供高性能的关节驱动。
**电动工具**:用于开发高性能、低成本的电动工具电机控制器。
**教育研究**:作为学习 FOC 算法、电机控制和嵌入式系统设计的优秀开源平台。
**DIY 项目**:为个人机器人项目、CNC 或 3D 打印机提供定制化的电机驱动方案。