YOLOP:全景驾驶感知
YOLOP
3/5
🧩 软硬件结合
已发布

项目简介
You Only Look Once for Panopitic Driving Perception.(MIR2022)
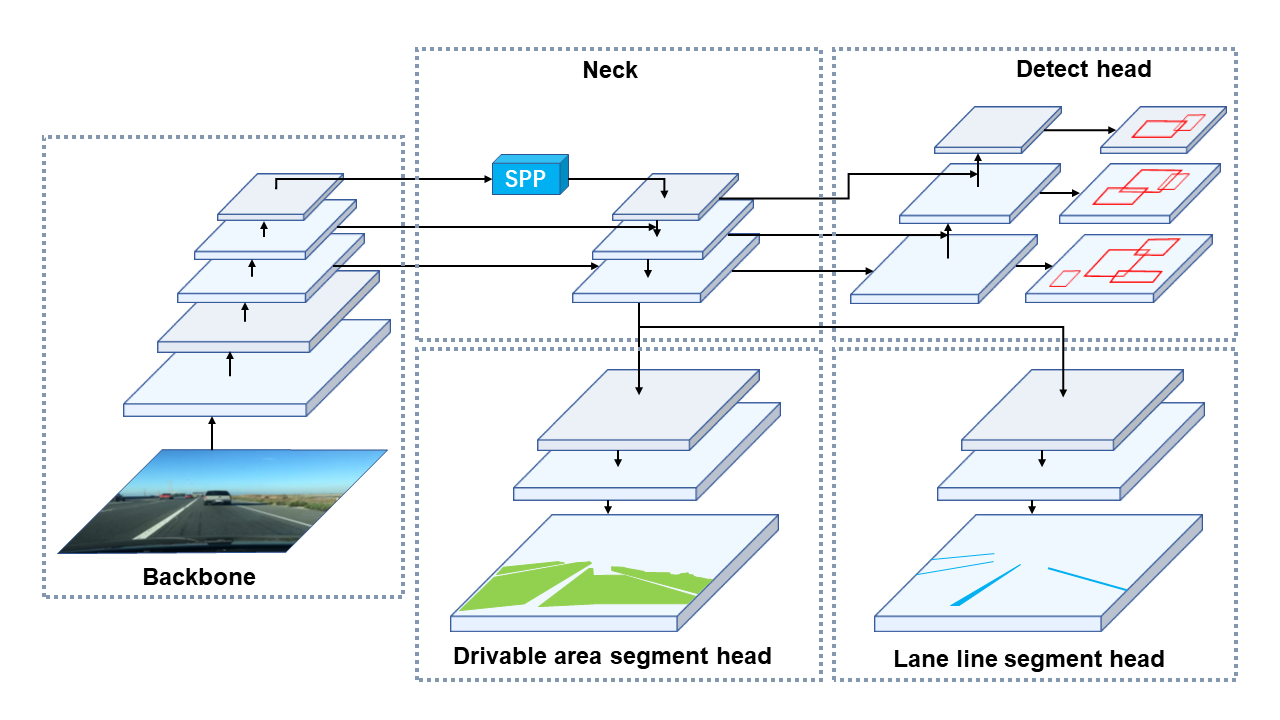
YOLOP(You Only Look Once for Panoptic driving Perception)是一个面向自动驾驶场景的高效多任务感知开源项目,由华中科技大学研究团队提出。其核心创新在于将目标检测、可行驶区域分割和车道线检测三项关键任务统一到一个端到端的神经网络中,实现了“一眼看全”的驾驶环境理解。
标签
项目特点
**多任务联合处理**:一个网络同时完成目标检测、可行驶区域分割和车道线检测,节省计算成本,减少推理时间。
**实时性能**:在嵌入式设备上达到实时推理速度(41 FPS),同时保持高精度。
**端到端学习**:三个任务可以联合学习,无需交替优化。
**网格预测机制**:验证了检测任务的网格预测机制与语义分割任务高度相关,为多任务学习提供参考。
**完整工具链**:提供训练、测试、演示、部署和数据集预处理等全套工具。
技术规格
| 模型架构 | 基于YOLOv5的改进多任务网络 |
|---|---|
| 输入尺寸 | 默认640x640 |
| 目标检测 | Recall 89.2%, mAP50 76.5% (BDD100K) |
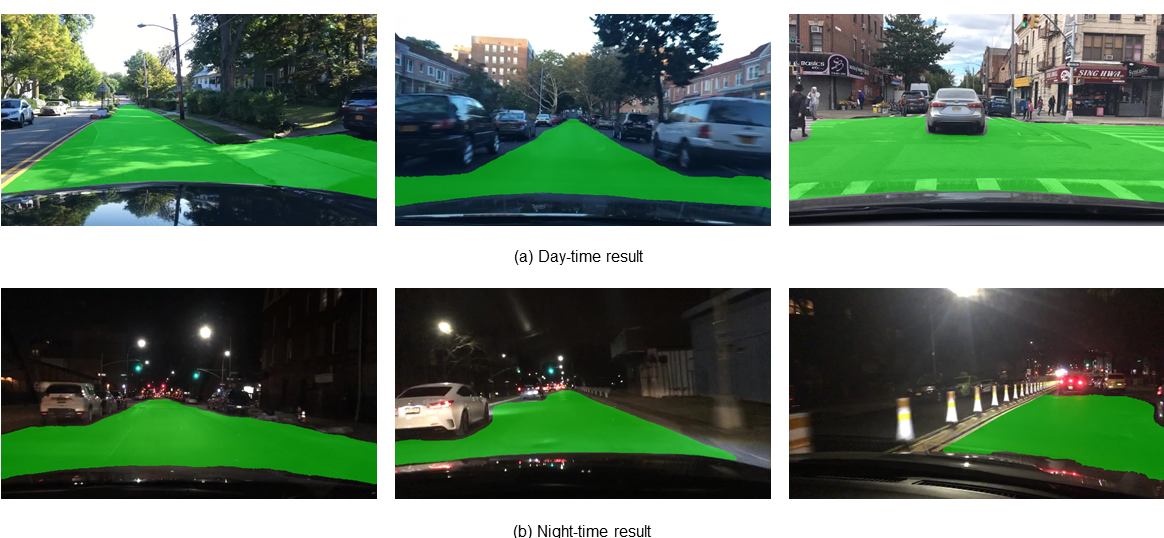
| 可行驶区域分割 | mIOU 91.5% (BDD100K) |
| 车道线检测 | Accuracy 70.5%, IoU 26.2% (BDD100K) |
| 推理速度 | 41 FPS (单卡GPU) |
| 框架 | PyTorch 1.7+ |
| 数据集 | BDD100K |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3.7 | 1 | — | 开发环境 |
| PyTorch 1.7+ | 1 | — | 深度学习框架 |
| torchvision 0.8+ | 1 | — | 图像处理库 |
| GPU (推荐NVIDIA) | 1 | — | 训练和推理 |
| 摄像头(可选) | 1 | — | 实时演示 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 2/5
🔵 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库




所需技能
🔧 **动手能力**:能够配置深度学习环境,安装依赖,运行训练和推理脚本。
💻 **编程能力**:熟悉Python,了解PyTorch框架,能够阅读和修改配置文件。
⚡ **电子电路**:无需硬件电路知识,但了解摄像头接口有助于实时演示。
适用场景
**自动驾驶感知系统**:作为车辆感知模块的核心算法,同时处理目标检测、可行驶区域和车道线。
**智能驾驶辅助系统**:用于ADAS系统中的多任务感知。
**学术研究**:作为多任务学习、自动驾驶感知的研究基准。
**嵌入式部署**:在Jetson等嵌入式设备上实现实时推理。