Avem 轻量级无人机飞控
Avem
机器人电机驱动板, 机器人, 飞控/无人机
3/5
🧩 软硬件结合
已发布
项目简介
🚁 轻量级无人机飞控-[Drone]-[STM32]-[PID]-[BLDC]
🚁 轻量级无人机飞控-[Drone]-[STM32]-[PID]-[BLDC]
标签
项目特点
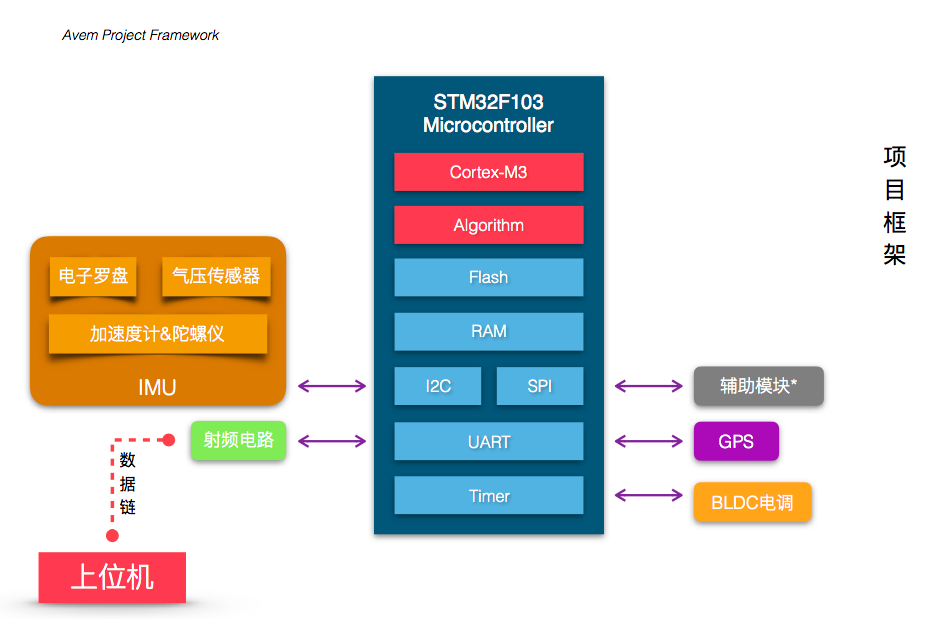
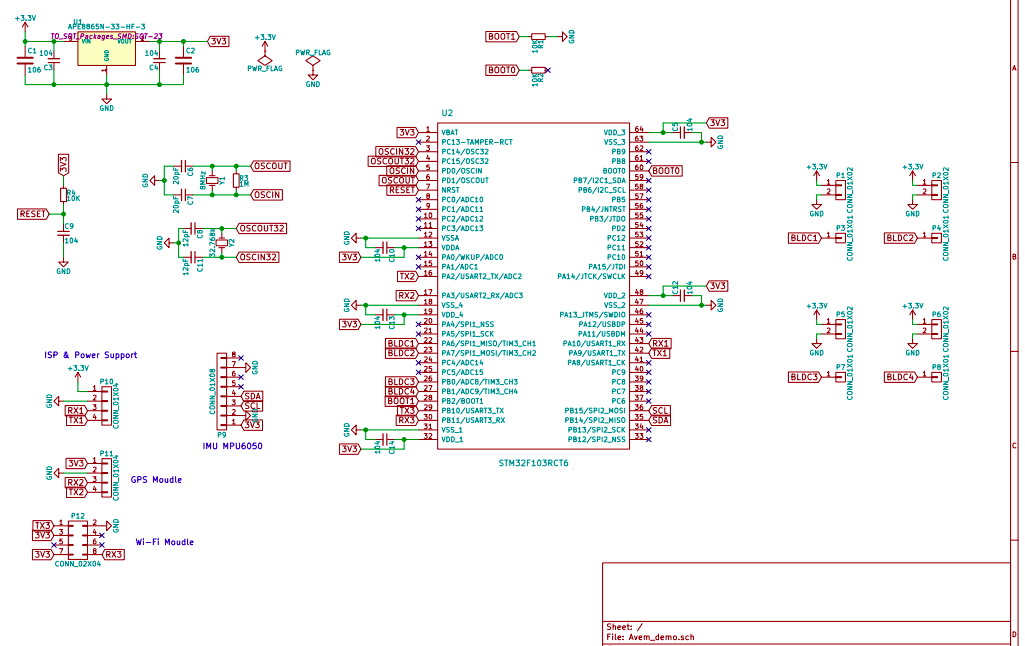
基于 STM32F103 主控,性能可靠
集成 MPU6050 六轴传感器,支持四元数与欧拉角姿态解算
采用级联 PID 控制算法,飞行稳定
支持无刷电机(BLDC)驱动
预留 Wi-Fi(ESP8266)和 GPS 扩展接口
提供完整的原理图和 PCB 布局文件(V3.0)
配套终端 HUD 显示工具(Avem_HUD)
支持 FreeRTOS 实时操作系统
提供 Flask + pyserial 上位机通信
技术规格
| 主控芯片 | STM32F103 |
|---|---|
| 传感器 | MPU6050(6轴陀螺仪+加速度计) |
| 姿态解算 | 四元数 & 欧拉角 |
| 控制算法 | 级联 PID |
| 电机驱动 | 无刷电机(BLDC),4通道PWM输出 |
| 通信接口 | USART3(Wi-Fi ESP8266),预留GPS |
| 软件I2C | SCL PB15, SDA PB14 |
| 操作系统 | FreeRTOS |
| 上位机 | Flask + pyserial |
| 配套工具 | Avem_HUD(终端HUD显示) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| STM32F103 开发板 | 1 | — | 核心控制板 |
| MPU6050 模块 | 1 | — | 六轴姿态传感器 |
| 无刷电机(BLDC) | 4 | — | 四旋翼用 |
| 无刷电调 | 4 | — | 与电机匹配 |
| ESP8266 Wi-Fi模块 | 1 | — | 可选,用于无线通信 |
| GPS模块 | 1 | — | 可选,预留接口 |
| 锂电池(3S/4S) | 1 | — | 根据电机和电调选择 |
| 机架 | 1 | — | 四旋翼机架 |
| 杜邦线、排针、电阻电容等 | 若干 | — | 焊接与连接用 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库

视频
所需技能
🔧 **动手能力**:需要熟练焊接电子元件、组装四旋翼机架、连接电机和电调,具备基本的硬件调试能力。
💻 **编程能力**:需要掌握C语言嵌入式开发,熟悉STM32 HAL库或标准库,了解FreeRTOS实时操作系统,能修改和调试PID参数。
⚡ **电子电路**:需要理解I2C、PWM、USART等通信协议,能看懂原理图和PCB布局,具备基本的电路测量和故障排查能力。
适用场景
无人机爱好者学习飞控原理与PID控制算法
基于STM32的嵌入式开发实践项目
定制化四旋翼无人机的二次开发
高校或研究机构的无人机教学与实验平台